— 8-50 —
8.8.2. Home Return with Travel Limit
8.8.2.1. Home Return Mode: OS7
The OS7 mode is to return to the position of the nearest phase Z after the Motor gets out the area
of the input OTM (Travel limit, minus) or the input OTP (Travel limit, plus).
The home position is set at the position of phase Z signal thus assuring repeatability of home
position regardless of the sensitivity of the limit sensor.
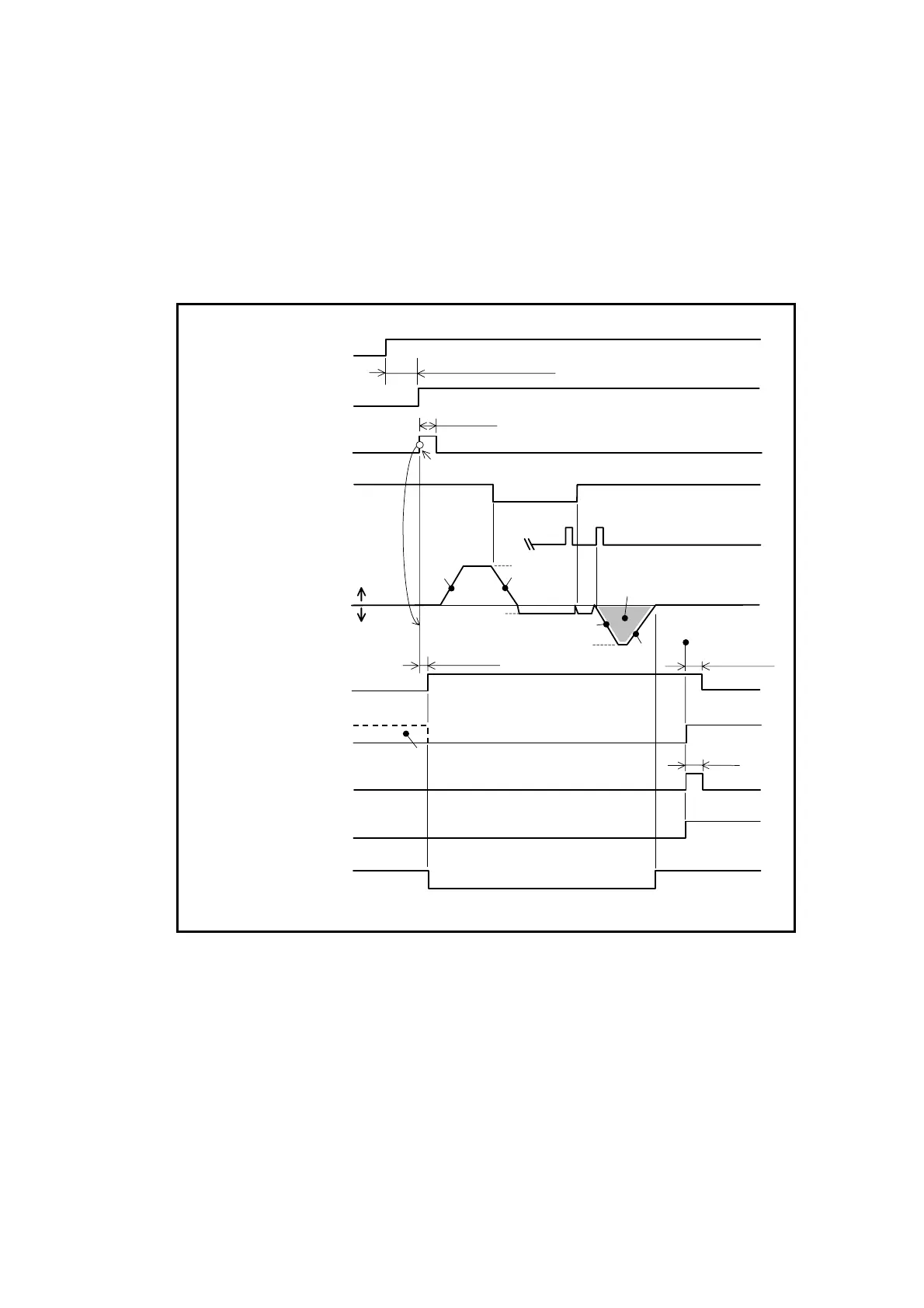
Fig 8-31: Signal timing of Home Return operation (In case of OS7, DI0, HD1 and HO<0)
Motor motion
Max. 170 ms (Max. 3.2 s)
Note
Ú
ON
OFF
closed
open
Input SVON
Output SVST
HV
Detection of rising signal edge starts Home return.
Min. 1ms.
Max. 0.5 ms
Max. 1 ms
Input HOS
ON
OFF
closed
open
BUSY
出力
closed
open
Output IPOS
(FW <
0: CFIN
)
closed
open
Output IPOS
(FW
> 0: FIN
)
HA
Closed if the target position is secured.
Opens if the target position is lost.
HB
closed
open
closed
open
FW value
Output HOME
Output HCMP
HZ
HO
HB
HA
Input OTM
ON
OFF
Output phase Z
HV
1)
2)
3)
4)
5)
6)
Completes Home
Return
7)
Note
Ú
: It takes 3.2 second for the first activation of
the servo after the power is on.
CCW
CW
1) Activate the input SVON (Servo on) to turn on the Motor servo.
2) The output SVST (Servo state) closes by an activation of the Motor servo.
3) Activate the input HOS to start the Home Return.
The Motor starts in the direction instructed by the parameter HD (Home Return
direction) following the current direction setting of scale system.
(The parameters are set to DI0 and HD1 in the above figure.)
The Motor rotates in accordance with the settings of parameter HA (Home Return
acceleration), HB (Home Return deceleration) and HV (Home Return velocity).

 Loading...
Loading...


