— 8-51 —
4) The output BUSY (In-operation) is closed during Home Return operation. The home
position is in a state of undefined, thus the System forcibly opens the output HCMP
(Home position defined).
5) The Motor decelerates and stops when the input OTM changes to OFF form ON
(because of minus logic set on the shipping set), then gets out the limit sensor area with
velocity set by the HZ (Home return near-zero velocity).
6) The Motor rotates to the position at the first phase Z signal after passing the limit
sensor area. Then rotates further to the position set by the parameter HO (Home
position offset) to define the home position. At this time the output HCMP closes.
◊ Set the parameter value of HO to minus (HO < 0).
7) When the Motor settles at the home position, the outputs IPOS (In-position) and
HOME (Home Return complete) close, thus completing the operation.
If the Home Return operation is interrupted, the System cannot define the home position.
Entering of the command for an absolute positioning at this state will cause the warning A5
(Origin undefined).
You can program the command HS in a program channel. This will make you possible to start
the Home Return operation with the inputs RUN (Start program) and PRG (Internal program
channel selection).
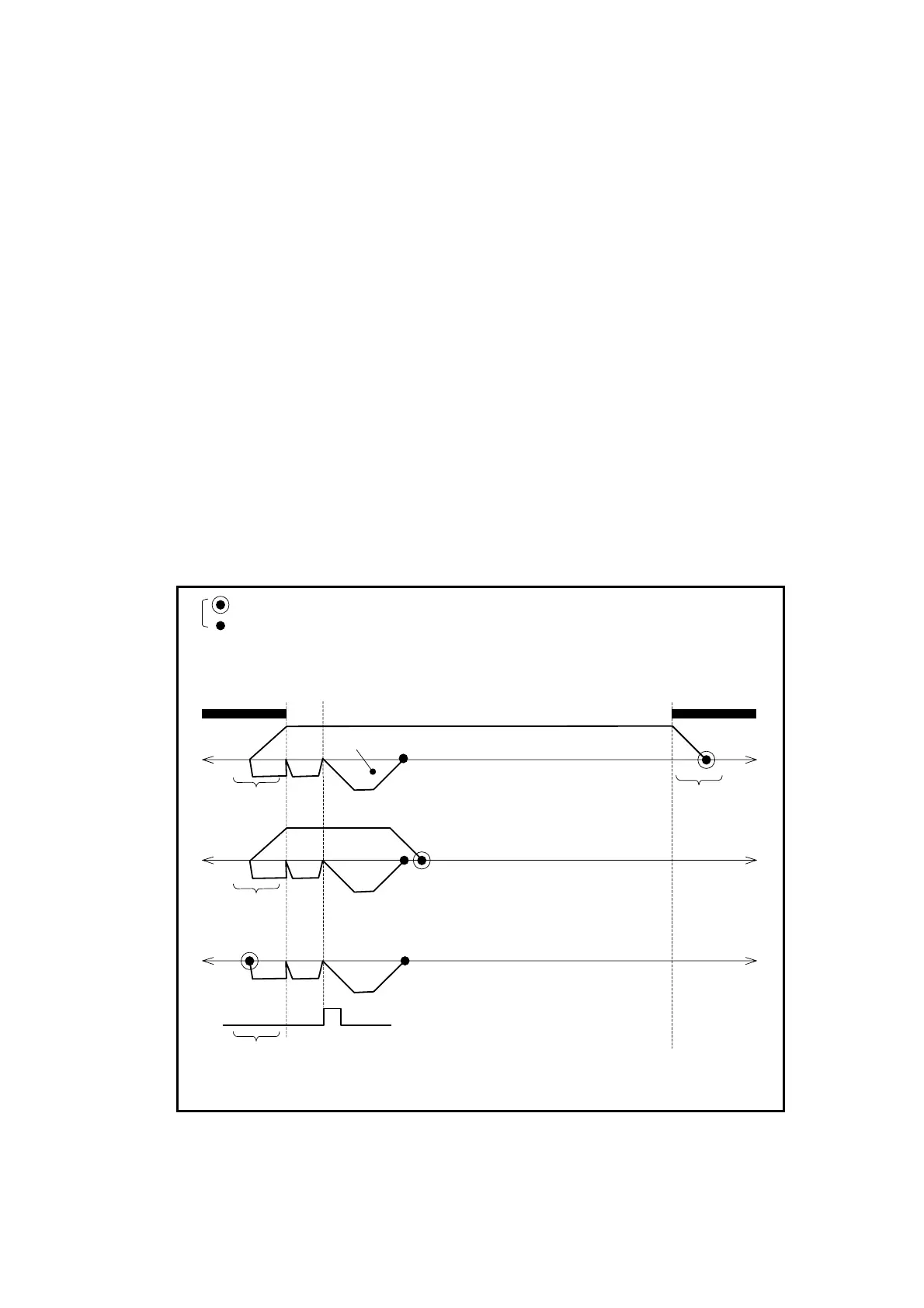
The pattern of Home Return operation depends on its starting point as illustrated below.
Fig 8-32: pattern of Home Return Operation (Incase of OS7, DI0, HD1 and HO <0)
: Home Return start position
: Home Return complete position
Input OTP ON
(CW diretion, over travel
area)
Input OTM *ON
(
CCW direction,
over travel llimit area)
CW direction
Ú
CCW direction
Ú
½
Velocity for CCW
Ú
¾
Velocity fo
CW
Ú
The OTPA opens during
this motion.
Phase Z
The output OTMA does not
open during this motion.
Output OTMA does not
open dutring this motion.
Output OTMA does not
open during this motion.
HO
Ú
When the Motor reverses its motion by the parameter HD, the CW and CCW
(CW
←→
CCW), and OTP and OTM (OTP
←→
OTM) respectively switch
positions with each other .
When the parameter HD is set to HD0, Home Return operation is performed based on the input
OTP.

 Loading...
Loading...


