— 8-12 —
8.2. Extended Control Input
8.2.1. Input HOLD: HLD
This input pauses the operation caused by an internal command. Deactivation of the input
HOLD starts the operation again.
Table 8-7: Signal locig of input HLD
Logic Description
OFF
• Deactivates the signal.
ON
• Starts deceleration and stops
operation.
When the HLD input is turned ON in the middle of operation caused by an internal command,
such as positioning command, jogging and Home Return, the Motor decelerates with the
deceleration rate specified in the operation program, then stops.
◊ This input is not effective for the pulse train command.
◊ If the input is turned ON in the middle of setting a parameter to a program, the Driver
Unit completes the setting of the program line, then holds operation.
While the operation is being hold, the Driver Unit holds operation caused by an internal
command or execution of a program. However the output BUSY (In-operation) remains closed.
The held operation starts again when the input HLD is OFF. If the operation involves rotation of
the Motor, the Motor accelerates again.
◊ Occurrence of an alarm and activation of the input STP (Stop) signal cancels the
holding state and the output BUSY opens. In such state, deactivation of the input HLD
does not start the operation again.
The output BUSY closes and the operation remains held while the input HLD is being ON, even
the input RUN (Start program) or the operation command is inputted.
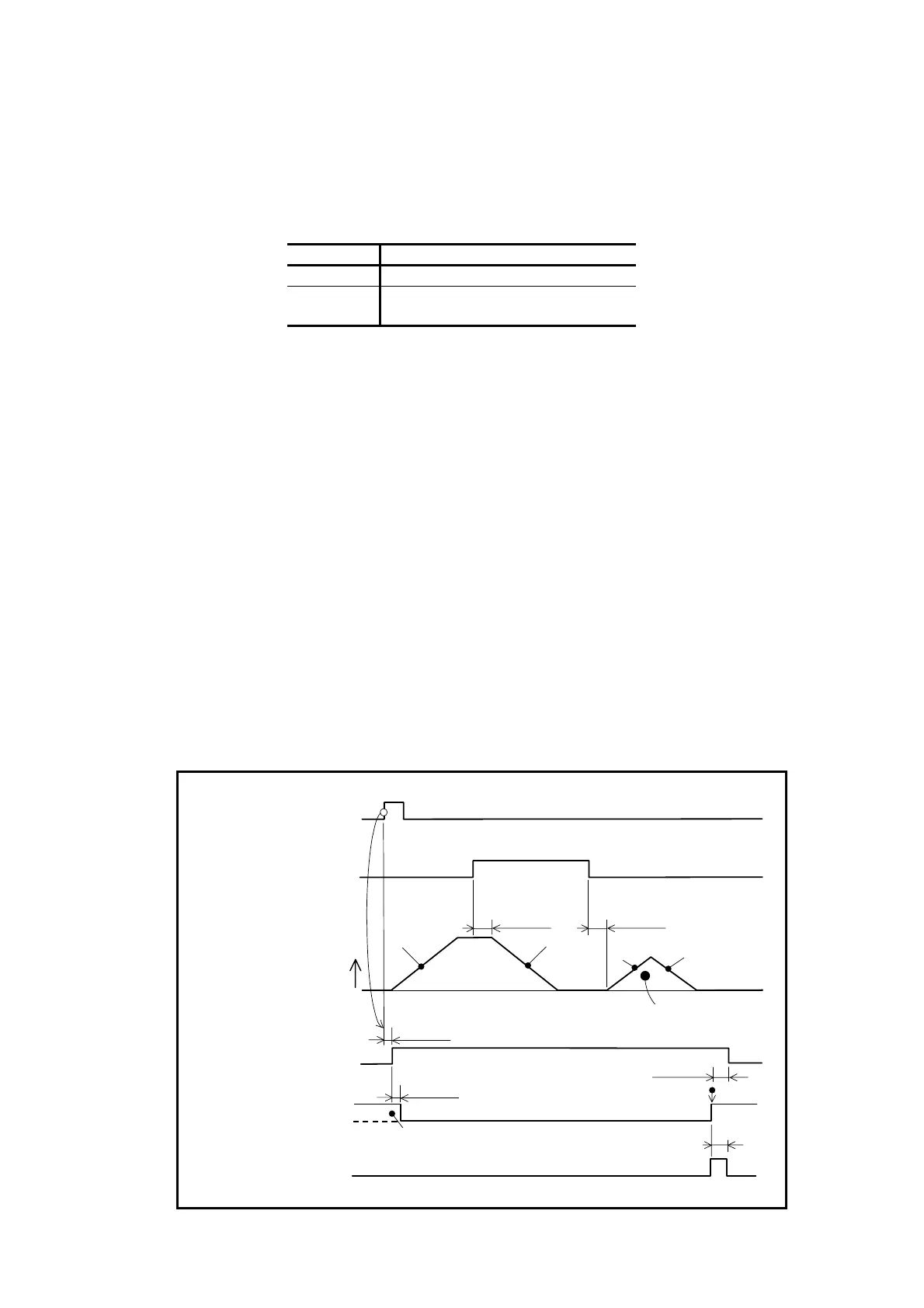
Fig 8-2 Signal timing of the input HLD (Internal command)
Motor motion
MA
ON
OFF
Velocity in
CW or CCW
closed
open
Max. 2 ms .
ON
OFF
Input HLD
Input RUN
closed
open
Output BUSY
closed
open
Output IPOS
(FW
>0: FIN
)
Max. 0.5 ms
Max. 0.5 ms
Output IPOS
(FW<
0: CFIN)
(FW =
0: IPOS
)
Max. 2 ms.
MB
MB
MA
FW
value
In-position
Closed when the target position data is held.
Opens when the target position data is lost.
Rest of rotation amount
Max. 1 ms
 Loading...
Loading...



