— 11-13 —
11.3.10. Warning C0: Position Command/Feedback Signal Error
This warning occurs when the transient velocity command is excessive in a pulse train command
or the position feedback output signal frequency is abnormal.
◊ The command TA/HI (Tell alarm history) will identify the cause of the warning.
In the pulse train input operation, the Driver Unit creates the transient parameter CR (Circular
Resolution) in accordance with inputting pulses. The transient velocity command gets
excessively high when the inputting pulse frequency is higher than the setting of parameter CR
(Circular Resolution), which is set relatively lower to make the Motor one revolution with fewer
pulses.
When the parameter FR (Feedback signal resolution) is specified, the parameter VL (Velocity
limiter) is automatically set. If the actual velocity exceeds the limit, the position feedback signal
may not be outputted correctly.
This alarm occurs when the operating condition does not meet to output the correct position
feedback signal.
◊ The transient velocity command in the pulse train input is too high.
◊ Impossible to output the position feedback signal due to excessive motor velocity.
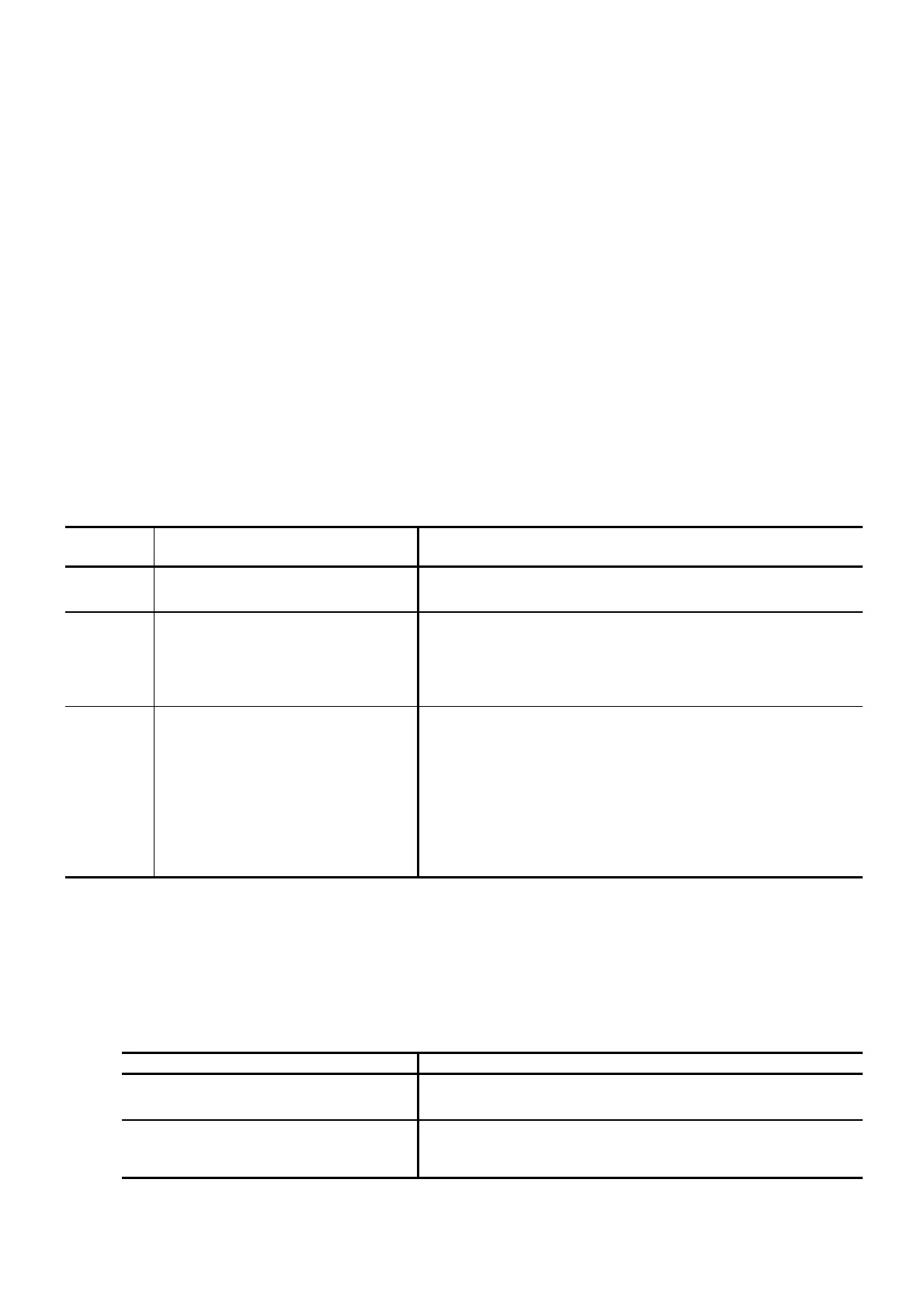
Table 11-17: Cause and remedy for the warning C0
Alarm
history
Cause Remedy
C0 – 0
The transient velocity command
exceeds 30 [s
-1
].
• Decrease the frequency of pulse train input.
• Increase the resolution of the parameter CR (Circular Resolution).
C0 –1
The transient velocity command
exceeding 1.5 times of the setting of
parameter VL(Velocity limiter) is
inputted longer than 1 [ms]
continuously.
• Decrease the frequency of pulse train input.
• Increase the resolution of the parameter CR (Circular Resolution).
• Decrease the setting of parameter FR (Feedback signal resolution).
C0 – 2
The frequency of position feedback
signal exceeded 2.3 [MHz].
• Decrease the setting of parameter FR (Feedback signal resolution).
• Decrease the Motor velocity.
Decrease the frequency of the pulse generating controller in case of
pulse train command operation. .
• If the velocity exceeds the setting of parameter VL(Velocity
limiter) because of external force, remove the effect of external
force.
• Refer to “5. Tuning” if the velocity exceeds the setting of
parameter VL(Velocity limiter) due to poor tuning.
(1) The input ACLR (Alarm clear) or the command CL (Clear alarm) clears the warning.
11.3.11. Alarm C3: CPU Error
The CPU integrated into the Driver Unit controls carious types of operation.
This alarm reports that the CPU is not properly functioning.
Table 11-8: Cause and remedy for CPU error alarm
Cause Remedy
(1)
The CPU is not functioning because
of noise.
• Reboot the power
• Take measures against noise.
(2) Defective Driver Unit
• When it does not recover by the reset of power, the Driver Unit
may be defective. Replace it referring to “Appendix 4: Procedure
for Replacing the EDC Driver Unit,” if necessary.

 Loading...
Loading...


