— 8-52 —
8.8.3. Teaching of Home Position
8.8.3.1. Home Return Mode: OS6
This mode is to set the current position to the home position.
This mode does not entail rotation of the Motor but requires the Motor servo is on the same as
other Home Return modes.
◊ Refer to “8.8.3.2. Teaching Home Position in Servo-off Sate” if you require teaching in
the servo-off state.
Teaching of the home position completes when the conditions for completion of positioning
operation are met at the teaching position.
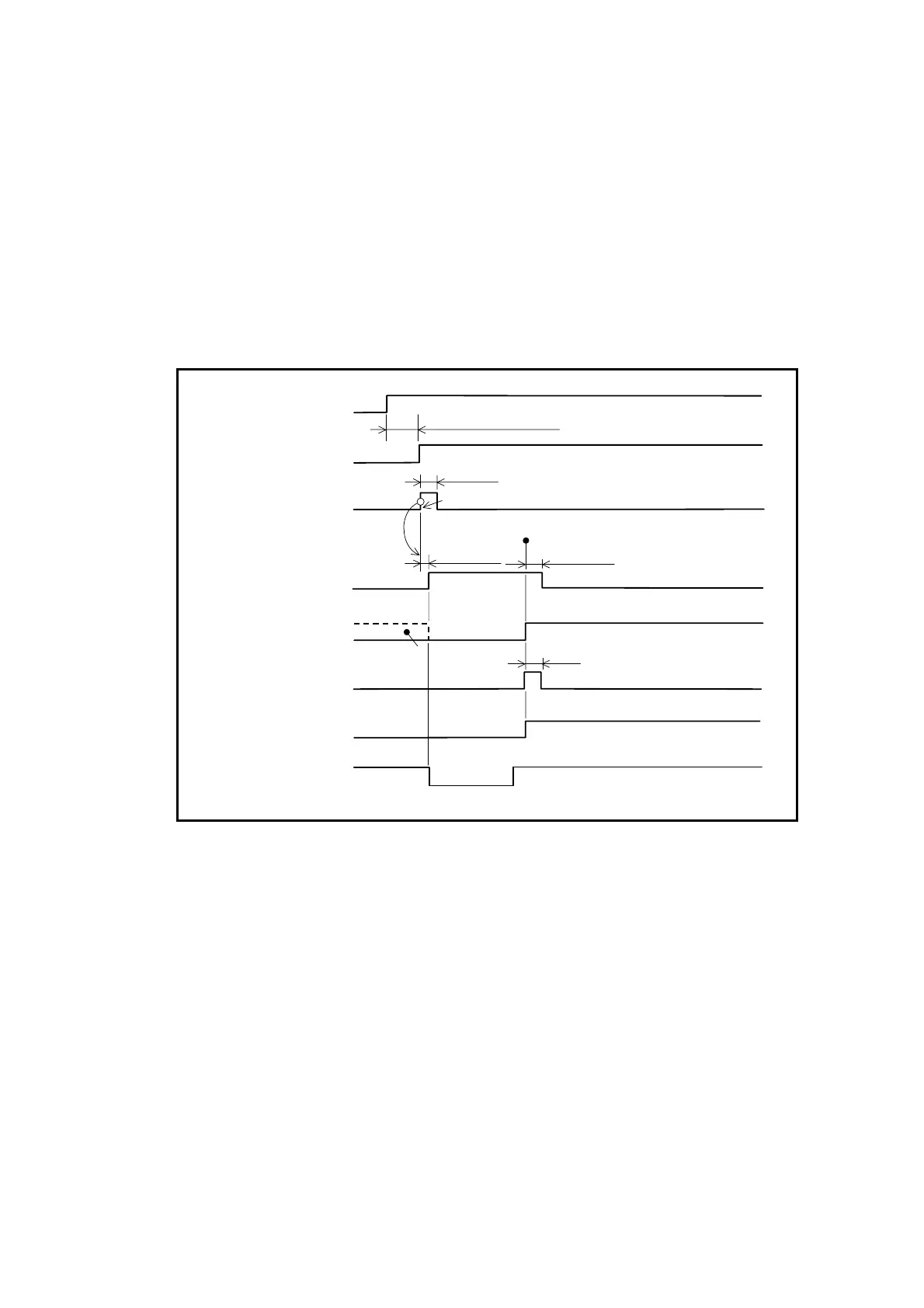
Fig 8-33: Signal timing of Home Return operation (In case of OS6)
Max. 170 ms (Max. 3.2 s)
Note
Ú
ON
OFF
closed
open
Input SVON
Output SVST
Starts operation at the detection of signal rising.
Min .1ms
Max. 0.5 ms.
Max. 1 ms.
Input HOS
ON
OFF
closed
open
Output BUSY
closed
open
Output IPOS
(FW<
0: CFIN
)
closed
open
Output IPOS
(FW >
0: FIN
)
closed
open
closed
open
Positioning complete
FW value
Output HOME
Output HCMP
Closed when the target position
is secured. Opens when the target
position is lost.
1)
2)
3)
4)
5)
6)
NoteÚ: Requires 3.2 seconds for the firat servo on
after the power is turned on.
1) Activate the Motor servo by the input SVON (Servo on).
2) The SVST (Servo state) closes when the Motor servo is turned on.
3) Turning the input HOS (Start Home Return) ON starts internal processing to set the
current position command to the home position.
4) During the internal processing, the output BUSY is closed. The home position is in the
undefined state and the output HCMP is forcibly opened.
5) The output HCMP is closed when the home position is defined.
6) When the motor settles at the home position, the outputs IPOS (In-position) and
HOME (Home Return complete) are closed, thus completing the operation.
If the Home Return operation is interrupted, the System cannot define the home position.
Entering the command for an absolute positioning at this state will cause the warning A5 (Origin
undefined).
You can program the command HS in a program channel. This will make you possible to start
the Home Return operation with the inputs RUN (Start program) and PRG (Internal program
channel selection).

 Loading...
Loading...


