— 8-28 —
8.5.2. Digital Filter
!
Caution : Use of multi-stage filters may cause the velocity loop to be out of
phase, and it may cause unstable Motor operation.
!
Caution : Do not use three or more filters. If the filter frequency is too low,
hunting may occur. It is recommended to set the filter frequency
greater than 100 [Hz].
The digital filter filters the torque command, which is the output of velocity loop. There are two
kinds of filter: the low-pass filter and notch filter.
Te digital filters are used for reducing in resonant noise and vibration.
Table 8-28: List of digital filter
Name (code) Function
Initial
setting
Data range Unit
FP
Primary low-pass filter 0
0: Filter off
10 to 1 000
-
Hz
FS
Secondary low-pass filter 0
0: Filter off
10 to 1 000
-
Hz
NP
Primary notch filter 0
0: Filter off
40 to 1 000
-
Hz
NPQ
Primary notch filter, Q parameter 0.25 0.10 to 5.00 -
NS
Secondary notch filter 0
0: Filter off
40 to 1 000
-
Hz
NSQ
Secondary notch filter, Q parameter 0.25 0.10 to 5.00 -
Refer to “9. Details of Commands and Parameters” for details of parameters.
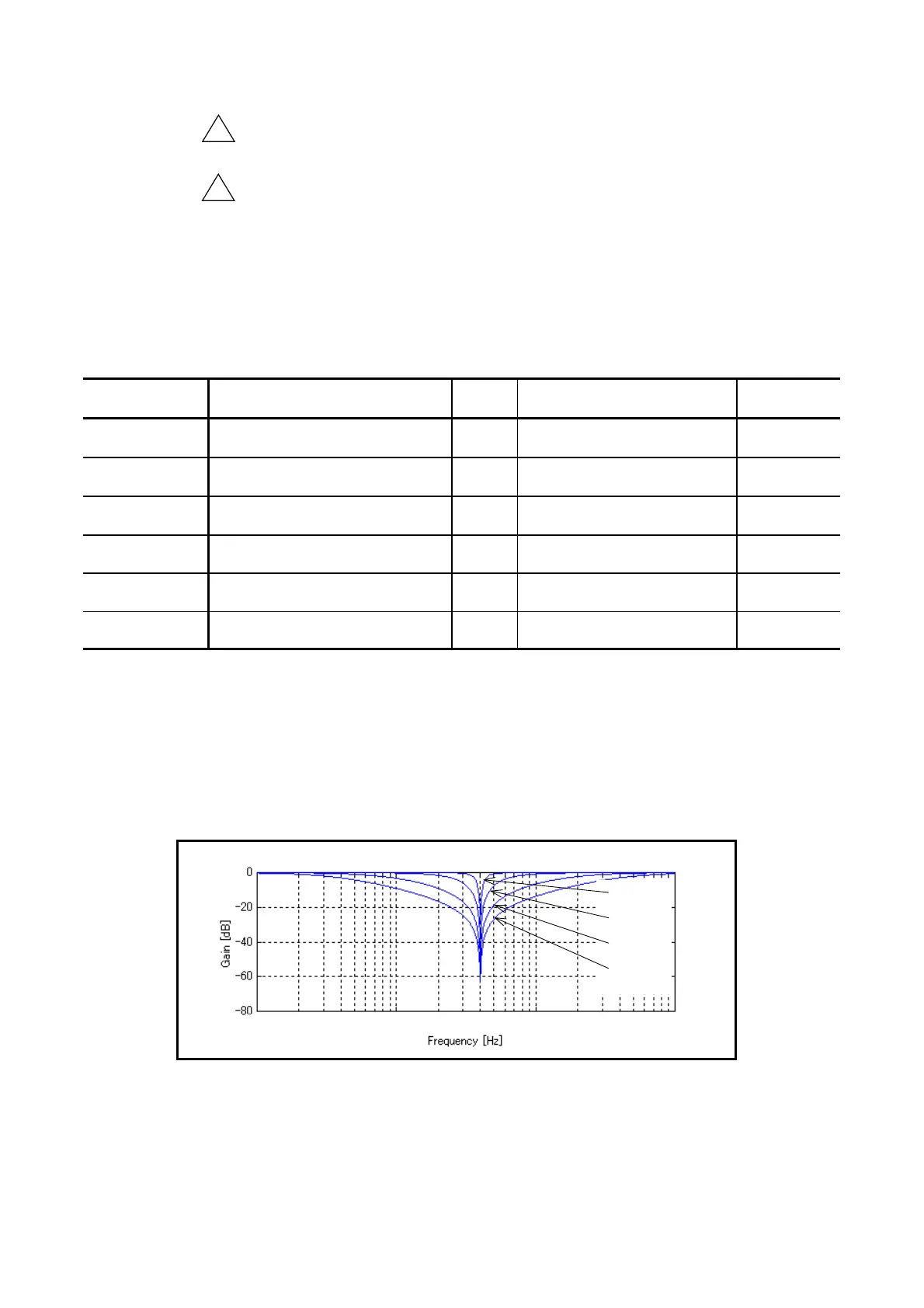
The figure below shows the change in the characteristics of notch filter by the parameters NPQ
and NSQ (Notch filter, primary Q parameter)
◊ The smaller the notch filter Q is, the wider frequency control is possible, centering
around the frequency set by the notch filter.
Fig 8-12: Characteristics of notch filter
NPQ5.00
NPQ1.00
NPQ0.25
NPQ0.15
NP

 Loading...
Loading...


