— 8-13 —
8.2.2. Velocity Override: ORD
In the middle of positioning operation, the input ORD overrides the programmed velocity with
the preset overriding rate.
Table 8-8: Signal logic of the input ORD
Logic Description
OFF
Does not override.
ON
Override the programmed velocity.
When the input ORD is turned ON in the middle of positioning operation caused by an internal
command, such as the command for positioning, jogging and Home Return, the Driver Unit
overrides the programmed velocity and changes it according to the preset override change rate.
Table 8-9: Parameter related to the input ORD
Parameter
name (code)
Name/Function
Initial
setting
Data range Unit
OV
Velocity override 100.00 0.00 to 200.00 %
When the programmed velocity is overridden, the System changes the operating velocity with
preset acceleration and deceleration.
◊ The acceleration, deceleration and acceleration profiling for overriding velocity follow
the programmed settings that has been dealt with.
When the ORD input activates during the operation of which programmed velocity is
MV2.000 [s
-1
] and override ratio is OV150%, the target velocity is changed to 3 [s
-1
].
◊ The overridden velocity is limited to 10 [s
-1
]. When the override velocity exceeds the
limit, it shall be limited to 10 [s
-1
].
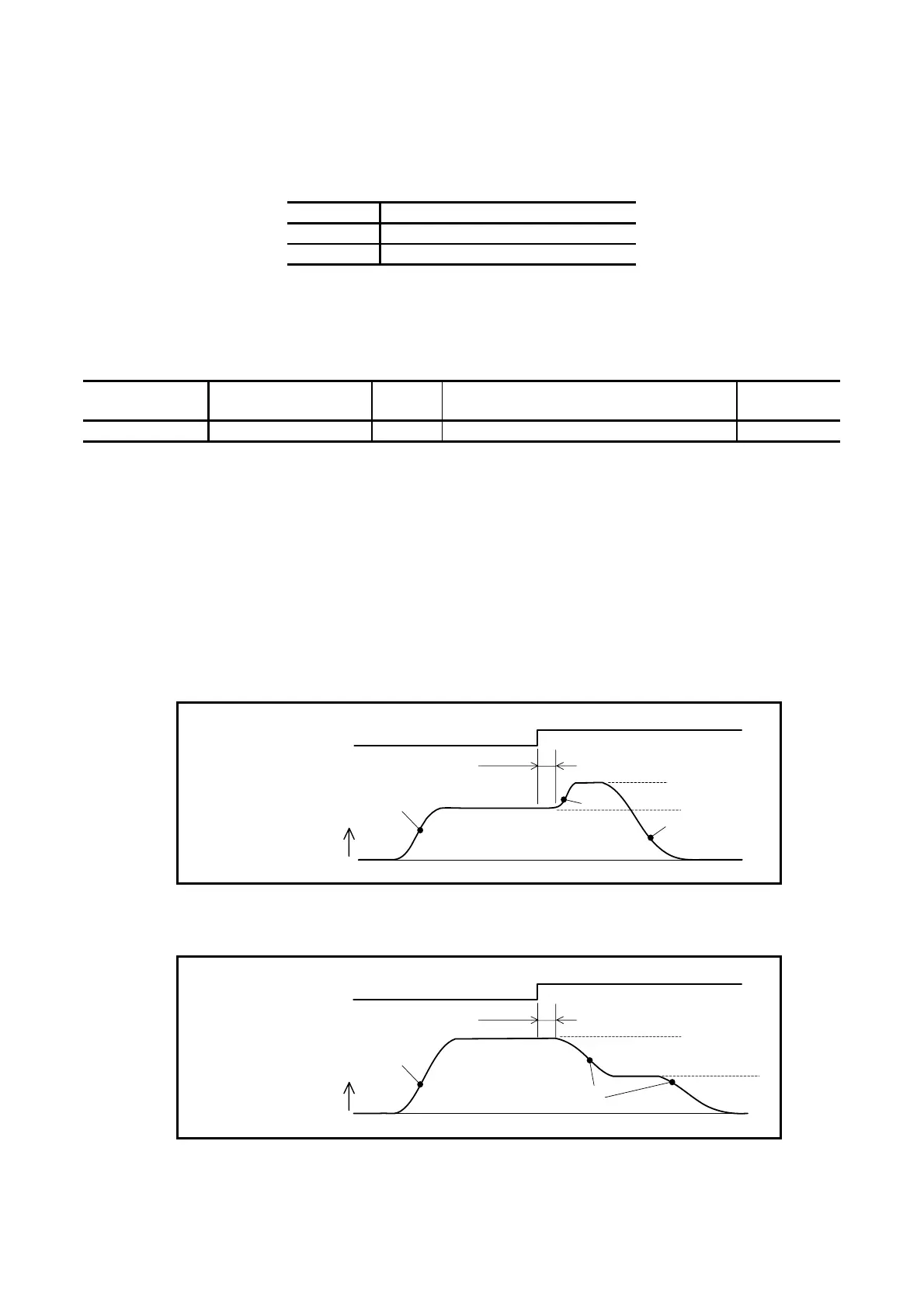
Fig 8-3: Signal timing of the ORD input (In case of OV150)
Motor velocity
MA
CW or
CCW
Max. 2 ms
ON
OFF
Input ORD
MB
MA
MV: 2 s
-1
MV × 150% = 3 s
-1
Fig 8-4: Signal timing of the ORD input: (In case of OV50)
Motor velocity
MA
CW or
CCW
Max. 2 ms.
ON
OFF
Input ORD
MB
MV × 50% = 1 s
-1
MV: 2 s
-1

 Loading...
Loading...


