— 2-2 —
2.1.2. Examples of System Configuration
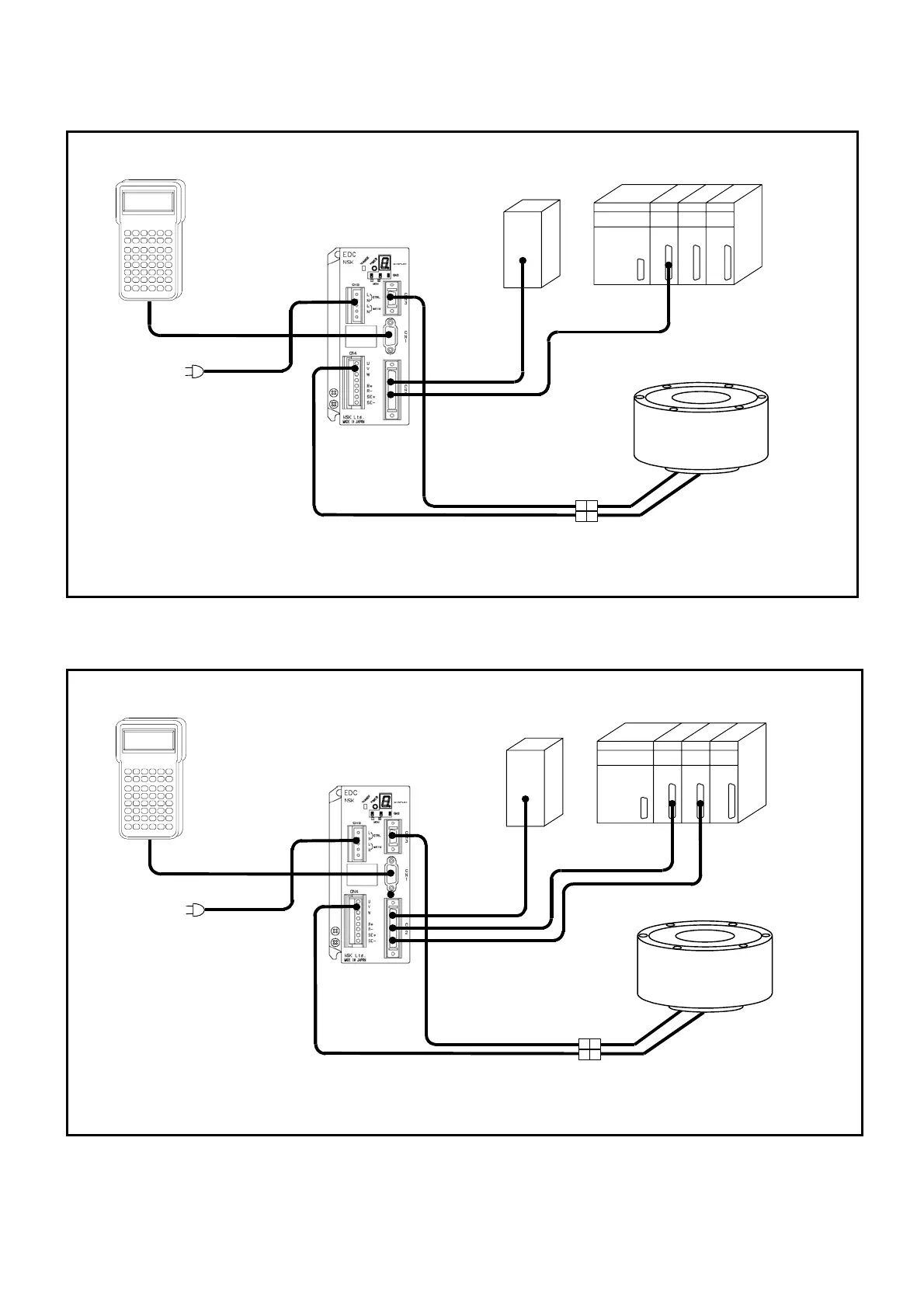
Fig 2-1: System configuration for program operation
Cable set
RS-232C
communication
Single phase:
200 to 230 [VAC]
or
100 to 115 [VAC]
Main power
PS series Megatorque Motor
PLC*
Motor controller*
24 VDC
power supply*
EDC Driver Unit
Handy Terminal
3
<
2
$
1
#
-
+
5
%
4
>
8
(
7
‘
6
&
.
=
0
?
9
)
CBA FED
IHG LKJ
ONM RQP
UTS XWV
?ZY */,
CTRLESCSHIFT ENTSPBS
NS
HANDY TERMINAL
Motor cable
Resolver cable
Contorl I/O signal
Control
power
* User shall provide these devices.
Fig 2-2: System configuration for pulse train command positioning
Cable set
RS-232C
communication
Single phase:
200 to 230 [VAC]
or
100 to 115 [VAC]
Main power
PS series Megatorque
Motor
PLC*
Motor controller*
24 VDC power supply*
EDC Driver Unit
Handy Terminal
3
<
2
$
1
#
-
+
5
%
4
>
8
(
7
‘
6
&
.
=
0
?
9
)
CBA FED
IHG LKJ
ONM RQP
UTS XWV
?ZY */,
CTRLESCSHIFT ENTSPBS
NSK
HANDY TERMINAL
Motor cable
Resolver cable
Control I/O signal
Control
power
* The user shall provide these devices.
Pulse train input
 Loading...
Loading...



