— 8-55 —
8.8.5. Teaching of Home Position Offset
In the Home Return operation, you may set the home position to the point at where the Motor
rotated a given amount of rotation from the changed position of the detecting state of home limit
sensor (from the phase Z signal in some Home Return mode). The parameter HO (Home offset)
sets this given amount of rotation (offset).
◊ Home position offset function is available for the Home Return modes (Parameter OS)
besides the parameter OS6.
◊ Teaching of home position offset is only effective right after an execution of the
command HS/LS.
This section describes a way to set the parameter HO by teaching.
1) Execute the command HS/LS and finalize the position of home limit sensor.
◊ Refer to “8.8.4. Position Adjustment of Home Limit Sensor.”
2) Turn off the main power supply to the Driver Unit.
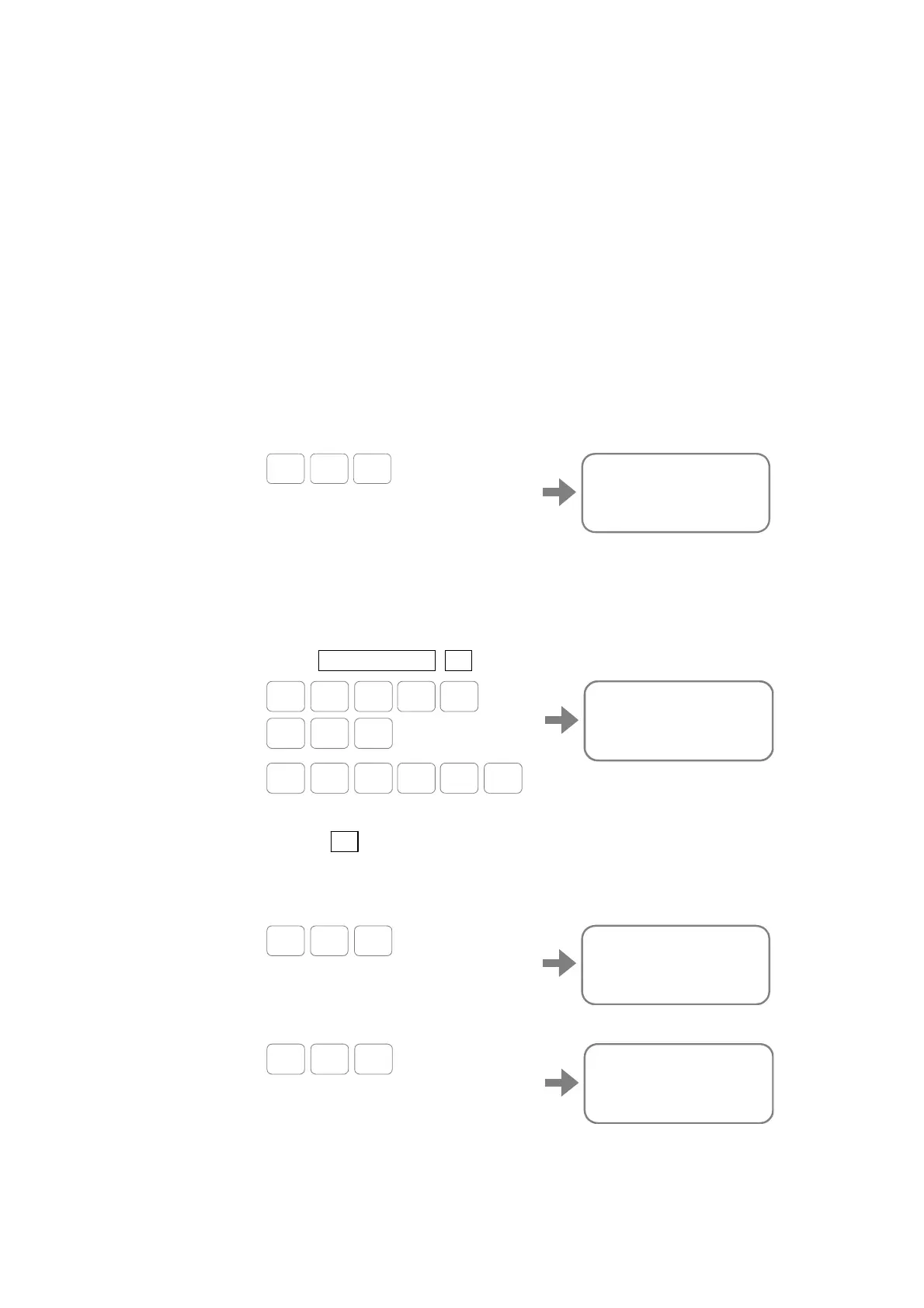
3) Input the command MO (Motor off)
MO
:_
O M
ENT
Thus the Motor servo will not activate even the input SVON is activated.
4) Move the motor to a position to be the home position.
5) Teach the direction and amount of rotation to the current position as the offset.
(The parameter HO requires an entry of the password.)
Input as Parameter code+/ST .
N
SP
/
:
NSK ON
NSK ON
:HO/ST
HO123456;_
N
ENT
O
S K
O / H T S
ENT
The teaching has set the parameter HO.
Input the SP
key for the prompt “colon (:)”
6) Turn on the main power to the Driver Unit.
7) Input the command SV (Servo on) to activate the Motor servo.
:
V
:_
V S
ENT
8) Start the Home Return operation.
S H
:
S
:_
ENT
Confirm that the Home Return is completed and the Motor stops at the set position.

 Loading...
Loading...


