— 7-15 —
7.2.6. In-position: IPOS
This signal reports completion (settling) of a positioning operation executed by a positioning
command. The settling means that the Motor has stopped at the target position with a margin of
error.
Table 7-22: Signal logic of the output IPOS
Logic Description
Open
Positioning uncompleted, or lost data of the target position.
Closed Positioning completed and the target position data secured.
When execution of positioning is not performed after turning on the power or when a positioning
operation is interrupted, the output IPOS does not close because the current position is not at the
target position.
The output IPOS does not close in the following conditions because the target position data is
not secured. In such a case, execute the positioning command again and complete it to make the
output IPOS closed.
◊ The positioning is interrupted by the input STP to stop the Motor.
◊ Turning the Motor servo off.
◊ The Motor stopped due to an alarm, warning and a detection of the travel limit.
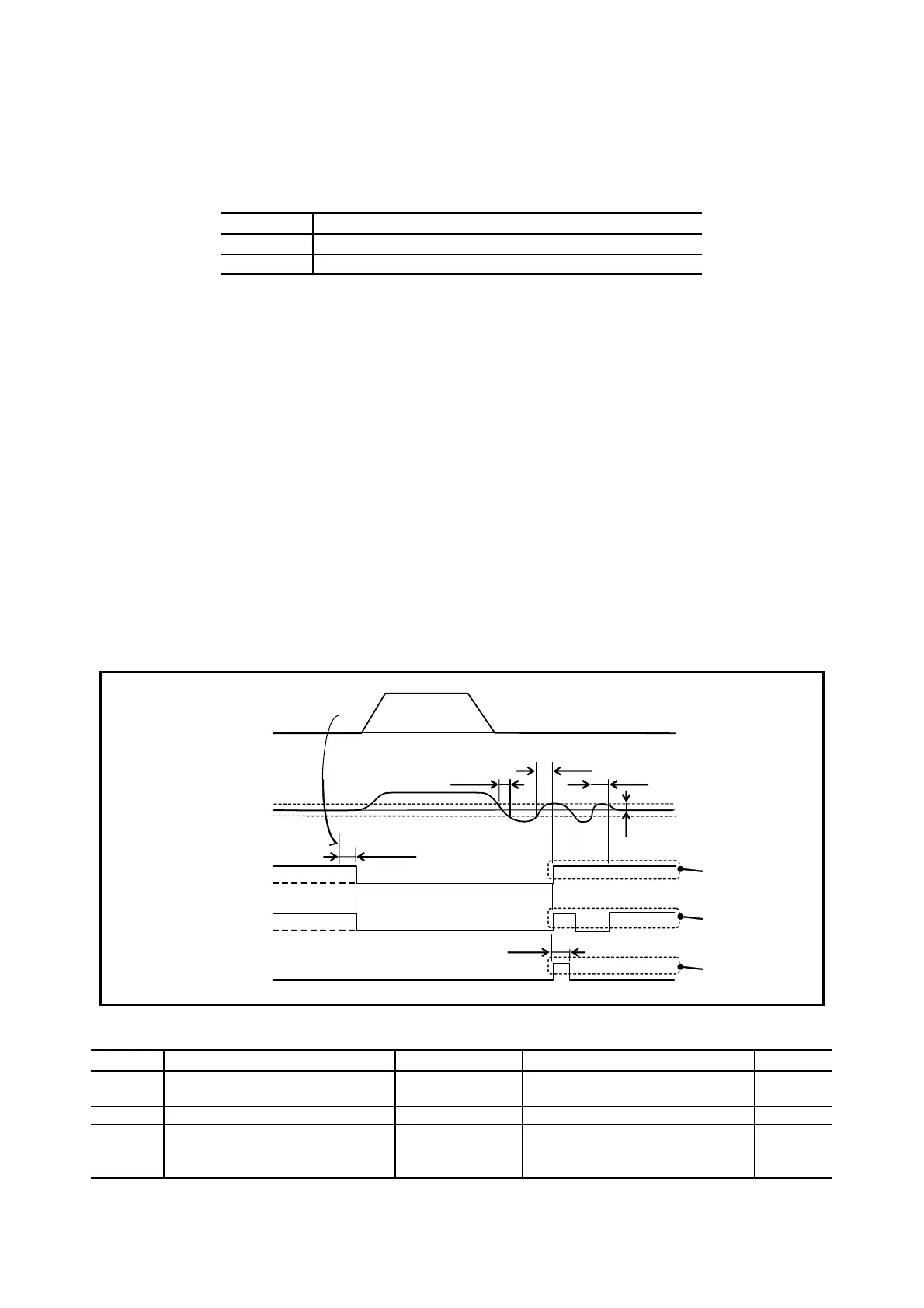
There are three reporting mode set by the parameter FW (FIN with).
◊ CFIN mode: Holds the completion signal after completion of positioning.
◊ IPOS mode: After completion of positioning, the way of outputting IPOS signal
depends on the position error.
◊ FIN mode: The System outputs a pulse signal at the completion of a positioning.
Fig 7-11: Difference in modes to output IPOS signal.
< 100 ms
100 ms
100 ms
Residual pulses of
the error counter
IN setting value
Motor motion
Stability timer
Example: IS100: 100 ms
Max. 1 ms
closed
open
Output IPOS
(FW =
0: IPOS)
FW setting value
closed
open
Output IPOS
FW > 0: FIN)
• Start of positioning
• Start to input pusle
train, etc
closed
open
Output IPOS
(FW<
0: CFIN)
Opens after outputting s
pulse for completion of
positioning
Forcibly opened while inputting command
Forcibly opened while inputting command
Opens or closes
depending on position
error.
Focibly closed at
completion of
positioning.
Table 7-23: Parameter related to the output IPOS
Name Function Initial setting Data range Unit
IN
In-position limit: Threshold of
outputting IPOS signal
400 0~2 621 439 pulse
IS In-position stability timer 0.0 0.0~10 000.0 ms
FW
FIN width: Sets the IPOS
outputting mode
-1.0
– 0.1 to – 0 000.0: CFIN mode
0.0: IPOS mode
0.1 to 10 000.0: FIN mode
ms
-
ms

 Loading...
Loading...


