— 5-10 —
5.3.2. Minor Tuning of Servo Gains
!
Danger : Take an appropriate precaution for a full turn of the Motor.
Minor tuning of servo loop gains is required in the following cases.
1) When an automatic tuning (Tuning Level 1) is not successful.
2) The parameter LO (Load inertia) is manually inputted.
Use the parameter SG (Servo gain) for minor tuning of servo loop gains.
◊ A higher SG setting improves the response to positioning command. However, the
Motor tends to vibrate when the SG setting is too high.
The minor tuning of servo loop gains automatically sets the following parameters that are related
to the servomechanism.
Table 5-5: Servo parameters set by the minor tuning of servo loop gains.
Parameter Description
PG
Position gain (position loop proportional gain)
VG
Velocity gain (velocity loop proportional gain)
When the automatic tuning is successfully completed, the parameter SG has been set
automatically for the estimated load inertia. Leave the setting as is and start the minor tuning of
the parameter SG.
If the automatic tuning has not been performed or the automatic tuning has not been successful
because of an error, perform the following procedures before the minor tuning.
!
Caution : When the parameter LO is manually set as described in “5.3.1. Input of
Load Inertia (Tuning Level 2), the parameters SG and FP (Primary
low- pass filter) are not set automatically. Set temporally the parameter
SG to “SG5” and the parameter FP to “FP200”, then start the minor
tuning.
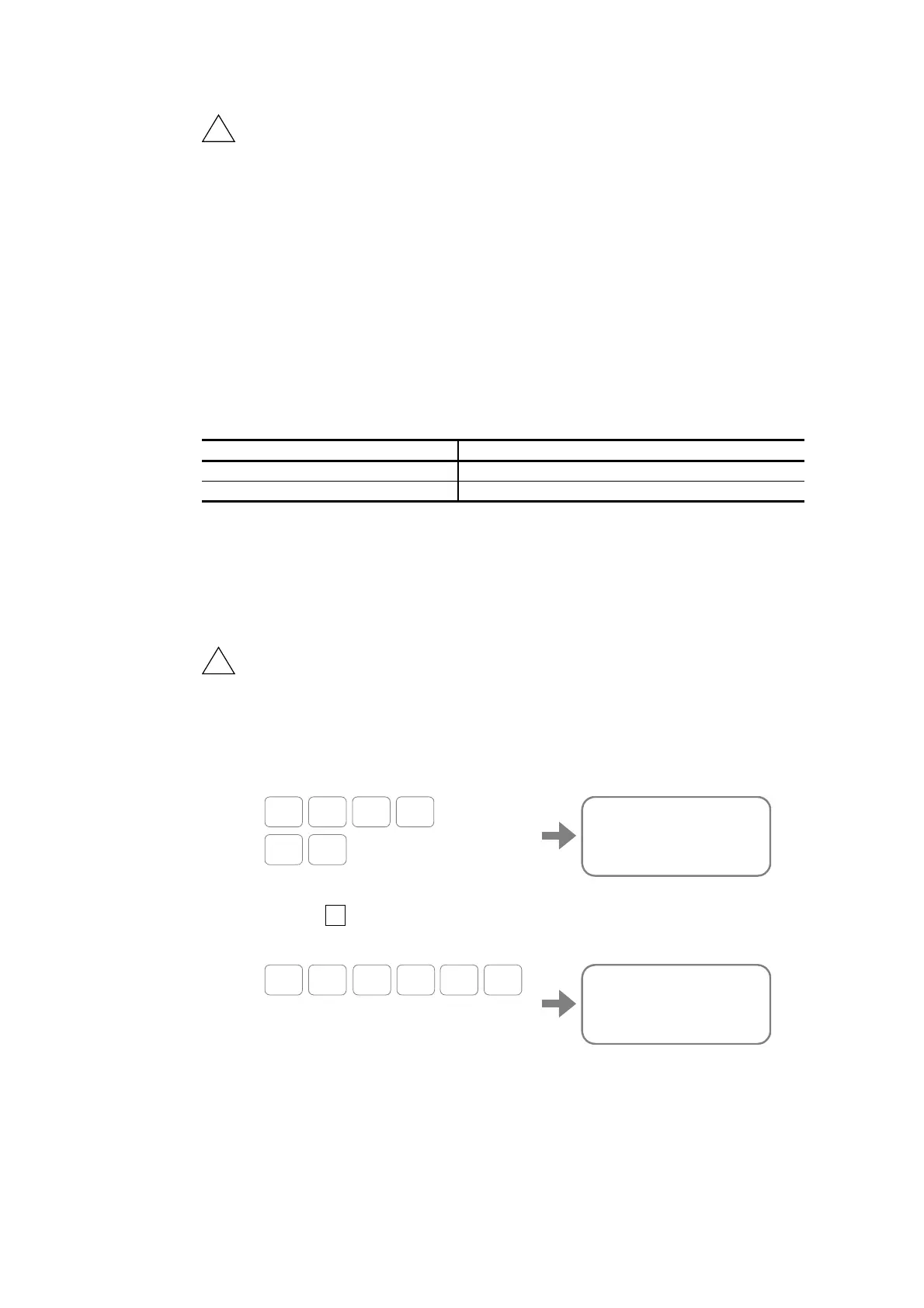
1) Set the servo gain.
:
:
:SG5
PG0.10;_
ENT
G 5
%
S
SP SP
Press the SP key several times till the prompt “: (colon) ” appears on the bottom line.
2) Set the low-pass filter to 200 Hz.
:
:FP200
:_
ENT
P 0
?
F 0
?
2
$

 Loading...
Loading...


