— 7-12 —
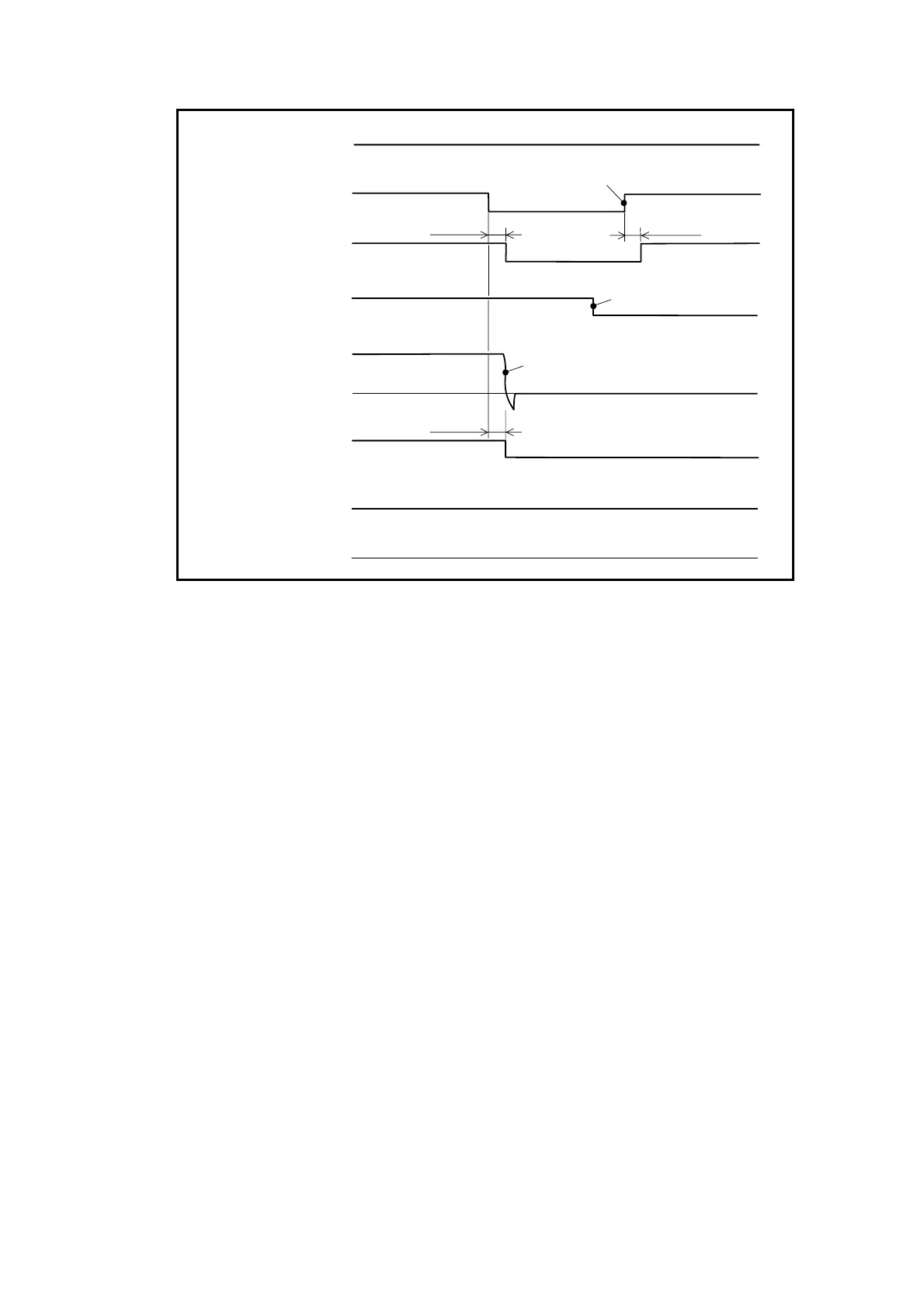
Fig 7-10: Signal timing of the input OTP and the output OTPA (negative logic)
Max. 1 ms Max. 1 ms
Max. 1 ms.
Motor motion
closed
open
closed
open
Output DRDY
Input OTP
Output SVST
closed
open
closed
open
Output BUSY
closed
open
closed
open
Output IPOS
(FW
> 0: FIN
)
Output OTPA
ON
OFF
Output IPOS
(FW <
0: CFIN
)
(FW =
0: IPOS
)
Immediately stops in the servo-on state.
Turn the servo OFF by the input
SVON, etc
.
Move the Motor out from the off-limits area or
Move out the Motor manually from the off-limit area after the servo is off.
When the over travel limit is detected in the middle of Motor rotation, the Motor stops before
completing the positioning, thus the output IPOS (In-position) will not be closed.
When the over travel limit is detected during the Motor is stopping, the output IPOS remains
unchanged because the Motor is holding the position at where the positioning operation
completed right before the detection of the over travel limit.

 Loading...
Loading...


