— 8-43 —
Setting parameters
Edit the setting for easy execution of the 90° index positioning.
Use the command IQ (Incremental positioning, user).
The target position is the points that equally divide the circumferential scale into four. That is for
an incremental step positioning of 90-angle degrees.
Set the parameter QR to “QR4.”
Set the program channel 0 to automatically execute the program when the power is turned on.
Set the parameter AE to “AE0.”
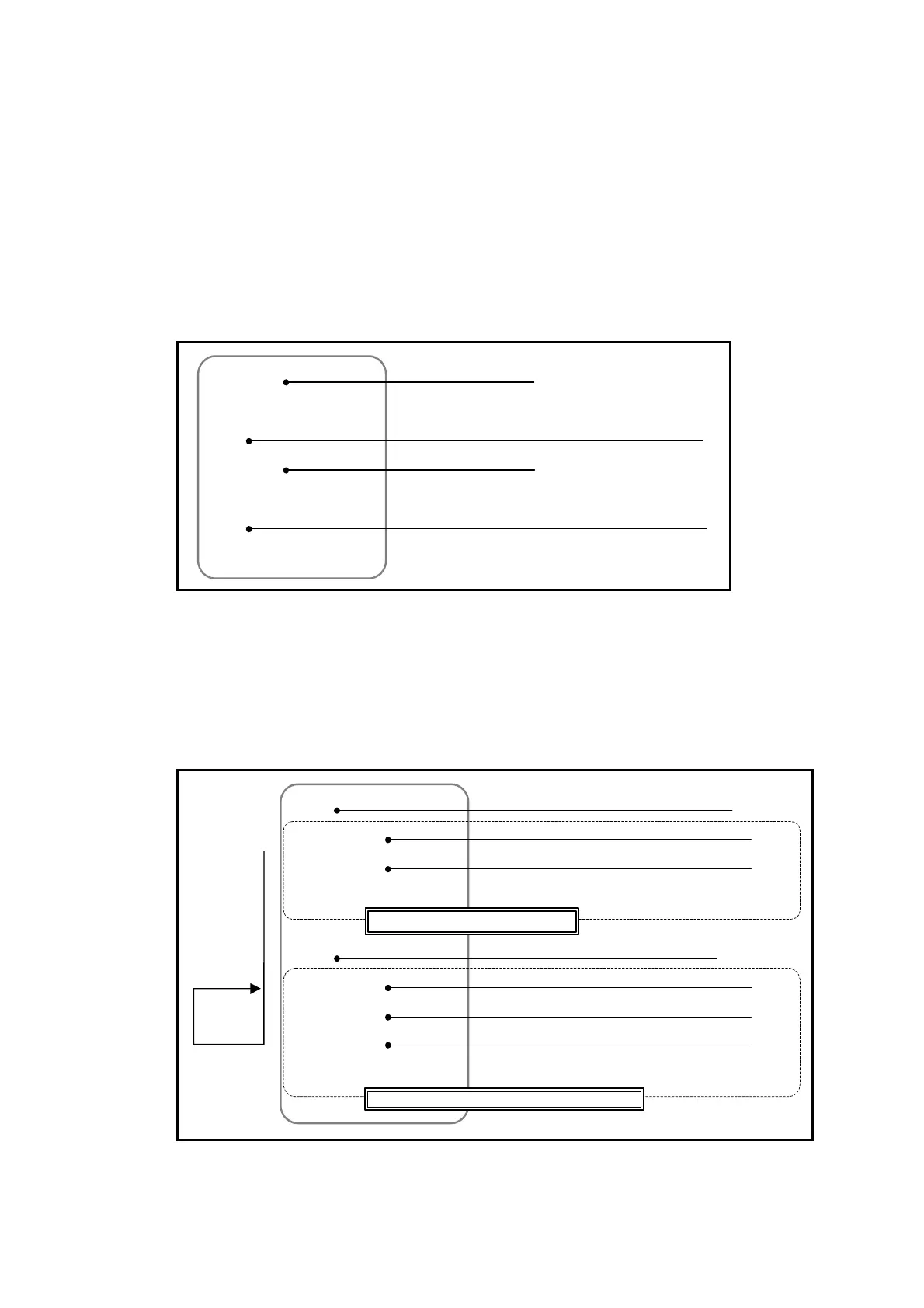
Fig 8-23: Setting dividing number of the position scale
:
/NSK ON
NSK ON
:
QR4
:
/NSK ON
NSK ON
:
AE0
:
Input the password.
Divide the position scale into four for a positioning in user
unit.
Input the password.
Start the program 0 automatically after the power is on.
.
Edit the program
Edit the program to repeat a positioning for 90 angle degrees.
The program consists of two parts: the part that waits for activation of the Motor servo and the
part that repeats a positioning for 90 angle degrees.
Fig 8-24: Edit the program
:
CH0
0?
TI3200.0
1?
JP1
2?
:
:
CH1
0?
IQ1
1?
TI1000
2?
JP1
3?
:
Declare to edit the program channel 0.
Set the waiting time for activation of Motor servo.
Waiting for activation of Motor servo.
Edit the program channel 1.
Repeat a step positioning for 90 angle degrees.
Jump to the front line of program channel 1.
Rotate one quarterly divided point (QR4).
Set one second for waiting time.
Jump to the front line of program channel 1.
Input of the
RUN command

 Loading...
Loading...


