Chapter 9 Inverter Functions
9-15-6
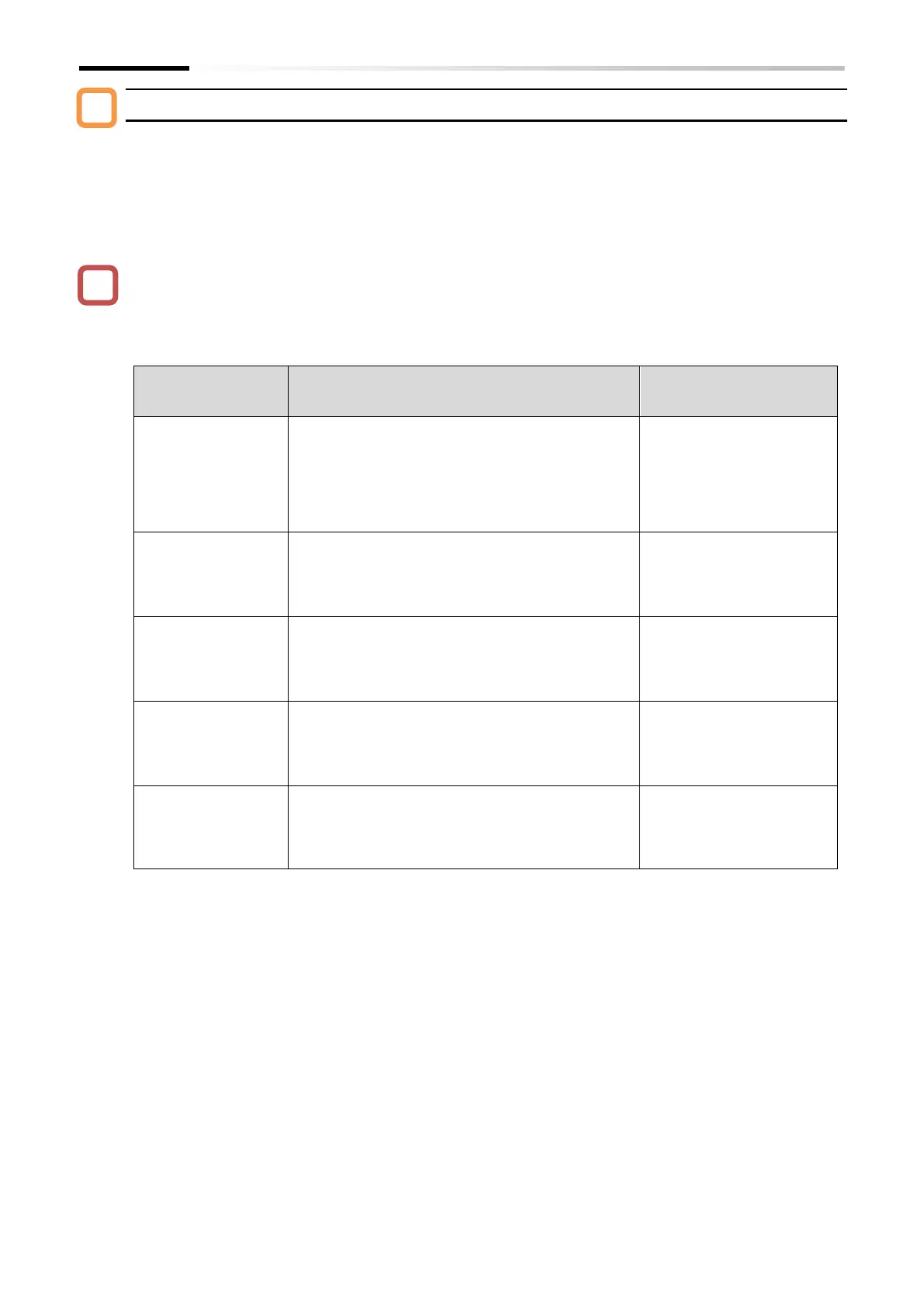
Command selection and input scale for analog input
Analog inputs from the [Ai1]/[Ai2] terminals can be switched to frequency commands/torque
commands/PID feedback signals, etc. by combining various parameter settings.
The table below lists the input commands for which analog input can be selected, related
setting parameters, and the full-scale range for each input command. For details, refer to the
section describing details of each item listed in the table below.
Depending on the setting, a single analog input value may be duplicated and input as two
commands. Please be careful not to allow duplicate inputs.
When "Torque limit selection [b040]" or "Torque reference input source selection [P033]" is set
as analog input, convert "Maximum frequency [A004]" to 200% and set the values.
Full scale range of each
command when the input
is 0 to 10 VDC/4 to 20 mA
Frequency input source selection [A001] =
Control terminal (01)
Selects [Ai1] (Voltage input) or [Ai2] (Current
input) depending on the "[AT] selection [A005]"
setting and the on/off state of the [AT] terminal.
For details, refer to "9.2.3 Setting Frequency
Command by Analog Inputs (Voltage/Current)".
0 to
maximum frequency (Hz)
PID enable [A071] = Enable (01) or (02)
PID feedback input source selection [A076] =
[Ai2] terminal input (current input) (00) or
[Ai1] terminal input (voltage input) (01)
For details, refer to "9.8.1 Using PID Control".
PID feed-forward
input source
selection
PID enable [A071] = Enable (01) or (02)
PID feed-forward input source selection [A079] =
[Ai1] terminal input (voltage input) (01) or
[Ai2] terminal input (current input) (02)
For details, refer to "9.8.1 Using PID Control".
Torque limit selection [b040] = Analog input (02)
Torque limit analog input is valid only for the
[Ai1] terminal (voltage input).
For details, refer to "9.6.2 Driving with Limited
Torque".
Torque reference input source selection [P033] =
[Ai1] terminal (00) (voltage input) or
[Ai2] terminal (current input) (01)
For details, refer to "9.6.3 Driving by Torque
Reference".

 Loading...
Loading...








