D2 Series Servo Drive User Manual Drive Configuration
HIWIN MIKROSYSTEM CORP. 5-47
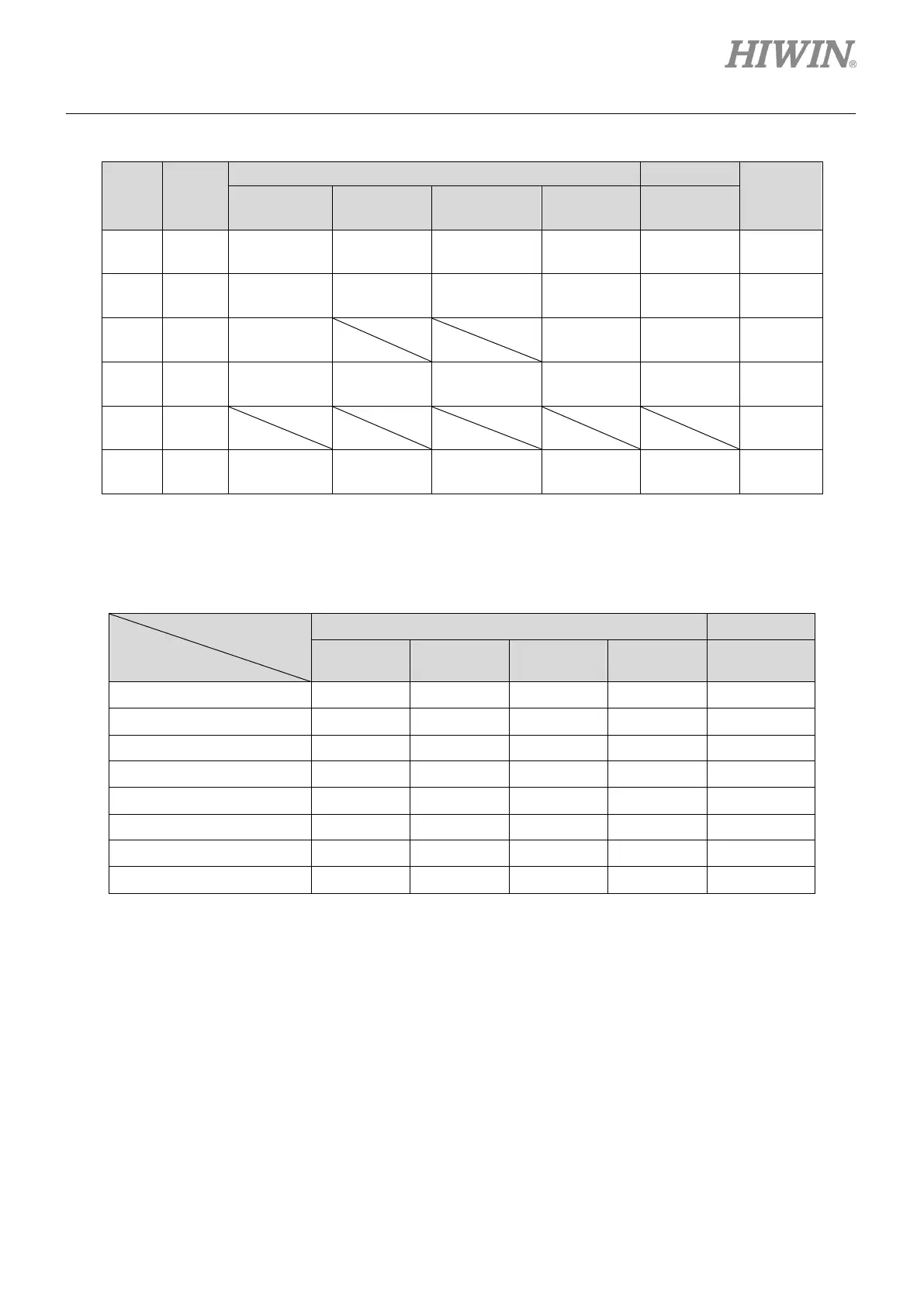
Table5.5.2.2 Default output setting for D2 drive
Pin Signal
Not CoE model CoE model
Inverse
Position
mode
Velocity
mode
Force/torque
mode
Stand-alone
mode
Stand-alone
mode
34, 35 O1 Servo Ready Servo Ready Servo Ready Servo Ready Servo Ready No
36, 37 O2 Errors Errors Errors Errors Errors No
38, 39 O3 In-Position In-Position In-Position No
10, 11 O4
Zero Speed
Detected
Zero Speed
Detected
Zero Speed
Detected
Zero Speed
Detected
Zero Speed
Detected
No
40, 12 O5* No
2
Brake Brake Brake Brake Brake No
Note:
*Only for D2T model.
Table5.5.2.3 Supported output functions for each operation mode
Operation mode
Output function
Not CoE model CoE model
Position
mode
Velocity
mode
Force/torque
mode
Stand-alone
mode
Stand-alone
mode
Brake
V V V V V
Servo ready
V V V V V
AXIS disable
V V V V V
In-position
V -- -- V V
Moving
V -- -- V V
Homed
V V V V V
Emulated index
V V V V --
Zero speed detected
V V V V --
Note:
“V” means that the output function has this function in the corresponding mode.
 Loading...
Loading...

