Troubleshooting D2 Series Servo Drive User Manual
9-8 HIWIN MIKROSYSTEM CORP.
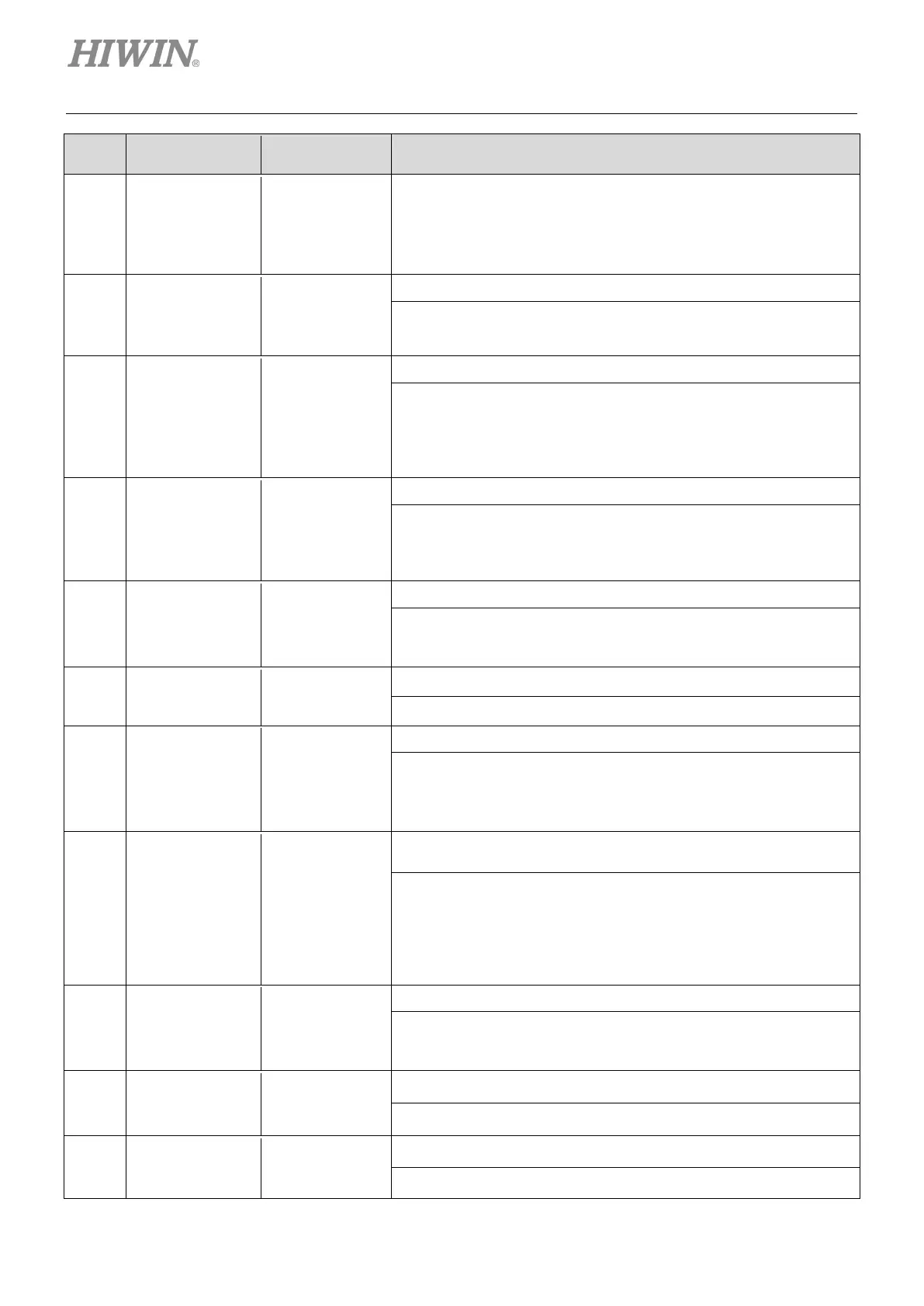
No. Error
Description Troubleshooting
ERR E07
(1) Check that the drive is placed in a well-ventilated location.
(2) Check if the ambient temperature is too high.
(3) Wait for the internal temperature of drive to decrease.
(4)
To drive a large load or operate at a high duty cycle, install the
heat sink if needed.
9
Under voltage
detected
E09 UND.V
or
ERR E09
The DC bus in the drive is too small.
Confirm that L1 and L2 of drive are connected to 220 Vac power
source. Use a multimeter to check whether the input is 220 Vac.
10
5V for encoder
card fail
E10 V5ERR
or
ERR E10
The 5V power supply of encoder interface is abnormal.
(1) Unplug CN6, CN7, and motor power cable of D2 drive. Check
whether there is still the error of “E10 V5ERR”. If yes, contact
the manufacturer for repair; otherwise, check if there is a short
circuit and then modify the wiring.
(2) Do not hot-plug CN6 and CN7 of D2 drive.
11
error
E11 PHINI
or
ERR E11
Motor phase initialization is failed.
(1) Check that the encoder signal is normal and motor parameters
are set correctly.
(2) Check if the payload is too high, the friction is too high, and
whether obstacles are on the way.
12
Serial Encoder
Communication
Error
E12 SER.E
or
ERR E12
The serial encoder communication has an error.
(1) Check that the encoder cable is connected to the drive.
(2) Check that the encoder cable complies with the motor
13
Hall sensor error
or
The less-wire encoder detects a hall signal error.
Check that the encoder cable is properly connected to the drive.
13
Current control
error
E15CURER
or
ERR E15
The current control has an error.
(1) Check that the motor model name is set correctly.
(2) Check that the current-loop gain (“Kp”) and servo gain are set
appropriately.
(3) Check that the encoder cable is connected correctly.
17
Hybrid deviation
too big
E17HYBDV
or
ERR E17
In the architecture of dual-loop control, the hybrid control deviation
exceeds the allowable maximum of hybrid control deviation.
(1) Check that the parameter of linear encoder is set correctly.
(2)
Check that the direction of linear encoder is consistent with the
rotary encoder, or if the linear encoder has the signal
interference.
(3) Check if the coupling is loose, the gear is not tightly engaged,
or the pitch tolerance or backlash of screw is too large.
18
STO active
E18STO
or
ERR E18
The STO safety function is triggered.
Reconnect STO to 24 V after the risk has been removed, and then
contact “DSF+” with “DSF-“ for 1 second to release the error
19
HFLT inconsistent
error
E19HFLT
or
ERR E19
Drive hardware signals are conflicted abnormally.
Check that each cable is grounded.
21
Incompatible
motor model and
E21WRGMT
or
The motor model name is not compatible with the drive.
Check that the motor model name is correct.
 Loading...
Loading...

