9-5
Status output Description
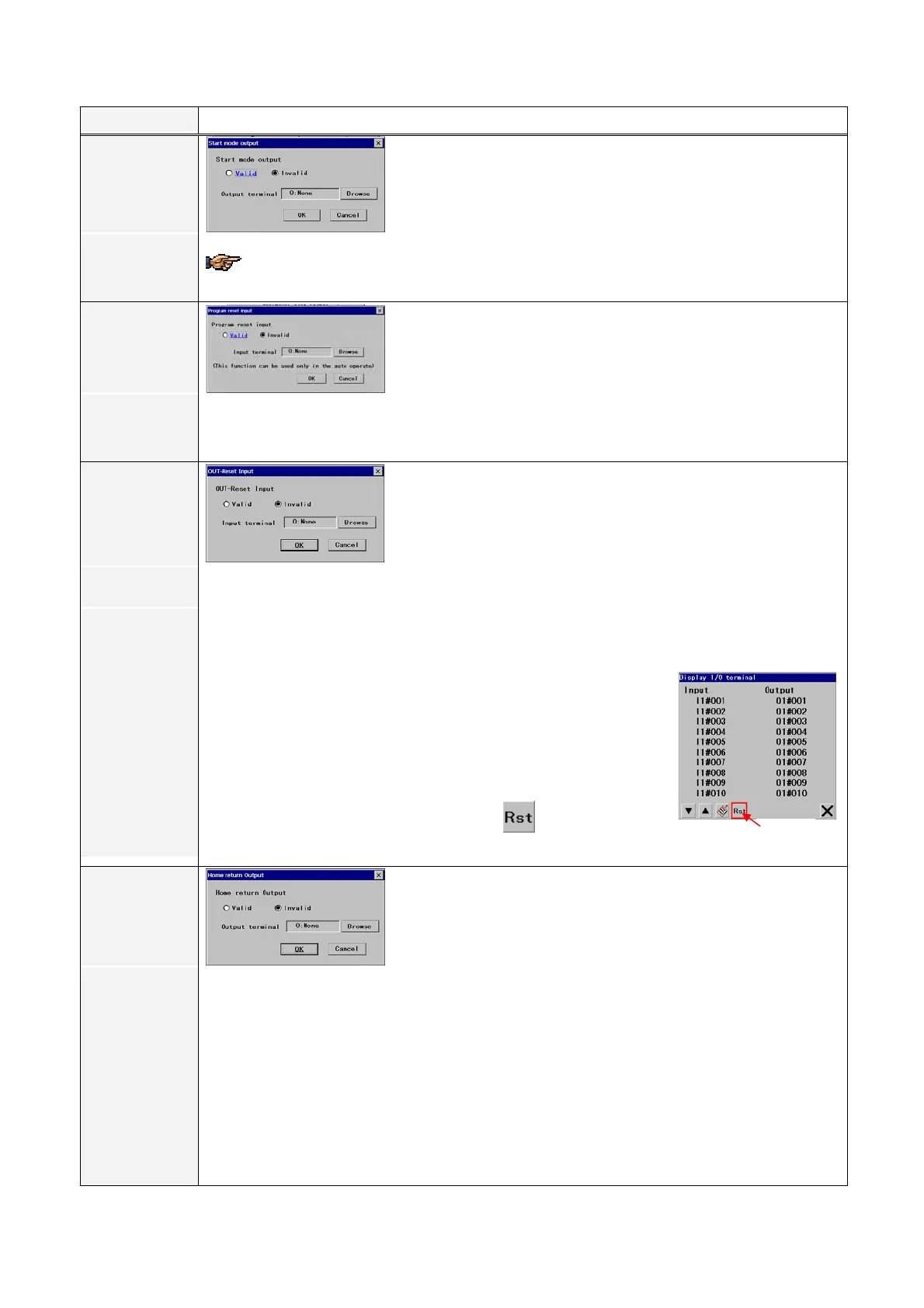
Start mode
output
[Valid/Invalid] Specifies the validity of the function.
[Output terminal] Specifies the output terminal name to be allocated to
the user output terminal.
It closes the running program file when the input is received.
It accepts the input while the operation is in hold or emergency stop state.
It accepts the input when the start method is set to “AUTO”.
Program reset
input
[Valid/Invalid] Specifies the validity of the function.
[Input terminal] Specifies the input terminal name to be allocated to the
user input terminal.
It outputs the signal when the mode select switch is switched to AUTO mode in manual start method.
It is turned OFF when the robot goes in Teach mode. (The signal remains ON during override
operation.)
Output reset
input
[Valid/Invalid] Specifies the validity of the function.
[Input terminal] Specifies the input terminal name to be allocated to the
user input terminal.
It is an input to reset all target output terminals to their initial power on state.
The target output terminals are user outputs, program reserve outputs and output strobes.
• The input is effective only in Auto mode.
• The input is not accepted while a file is open.
(That is, it is accepted when all files are closed after completion of
operation.)
• This input is accepted while a file is open in offline edit operation.
• The input is ignored when the Override is in the ON state or while
setting a dedicated output (such as an allocated output for Cube
monitor).
•
To reset the output in teach mode, click the
(reset) icon on the
“Display I/O terminal” box.
Reset icon
Home return
output
[Valid/Invalid] Specifies the validity of the function.
[Output terminal] Specifies the output terminal name to be allocated to
the user output terminal.
It outputs the signal when the robot reaches the home position while GOHOME command is ON.
The signal goes OFF when the robot moves out of the home position.
• If the output is ON, the output remains ON even if the robot goes in the emergency stop state.
• If the robot or an external axis that is a part of mechanism of the program “GOHOME” command is
executed moves out of the home position while the output is in ON state, the output is turned OFF.
• This “Home return Output” has priority over the “I/O lock”, that is, when this output is set valid, the
output is turned ON although I/O lock is set effective in the “Limitation of operation”.
• In case that the “Robot lock” is set effective in the “Limitation of operation”, the GOHOME command
is executed and then the home return output goes ON when the robot reaches its home position in
internal processing if the output is set valid.