12.9.3 Control Loop Configuration
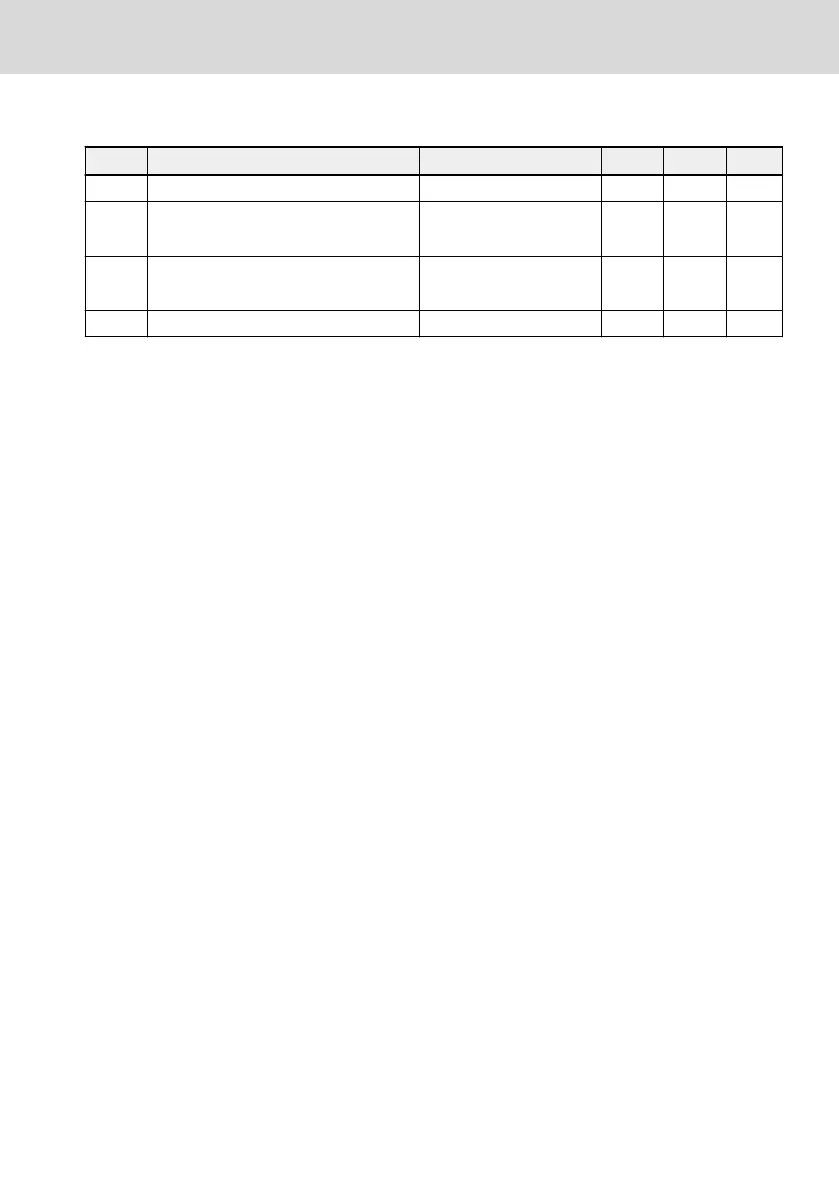
Code Name Setting range Default Min. Attri.
E4.15 Proportional gain - P 0.000...60.000 1.500 0.001 Run
E4.16 Integral time - Ti
0.00...100.00 s
(0.00: no integral)
1.50 0.01 Run
E4.17 Derivative time - Td
0.00...100.00 s
(0.00: no derivative)
0.00 0.01 Run
E4.18 Sampling period - T 0.01...100.00 s 0.50 0.01 Run
● Proportional gain - P: Decides the gain of deviation
– Larger P means larger scale and faster response, but excessively large P
leads to oscillation.
– P cannot eliminate deviation completely.
● Integral time - Ti: Used to eliminate the deviation
– Smaller Ti means faster response of the frequency converter to deviation
changes, but excessively small Ti leads to oscillation.
– If Ti = 0, integration is deactivated during PID control
– Integration stops but the integral value is kept.
– Integration continues if Ti ≠ 0.
● Derivative time - Td: Used to respond fast to changes of deviation between
reference and feedback.
– Larger Td means faster response, but excessively large Td leads to oscilla-
tion.
– If Td = 0, derivative is deactivated during PID control.
Derivative stops and its value is reset to '0'.
● Sampling period - T: Sampling time in PID control
The value should match with the selected time constant Ti or Td, normally
shorter than 1/5 of the time constant.
EFC x610 Series
Bosch Rexroth AG
Functions and Parameters
DOK-RCON03-EFC-X610***-IT05-EN-P
189/389

 Loading...
Loading...



