12.5.5 Stop Behavior Setting
Stop mode setting
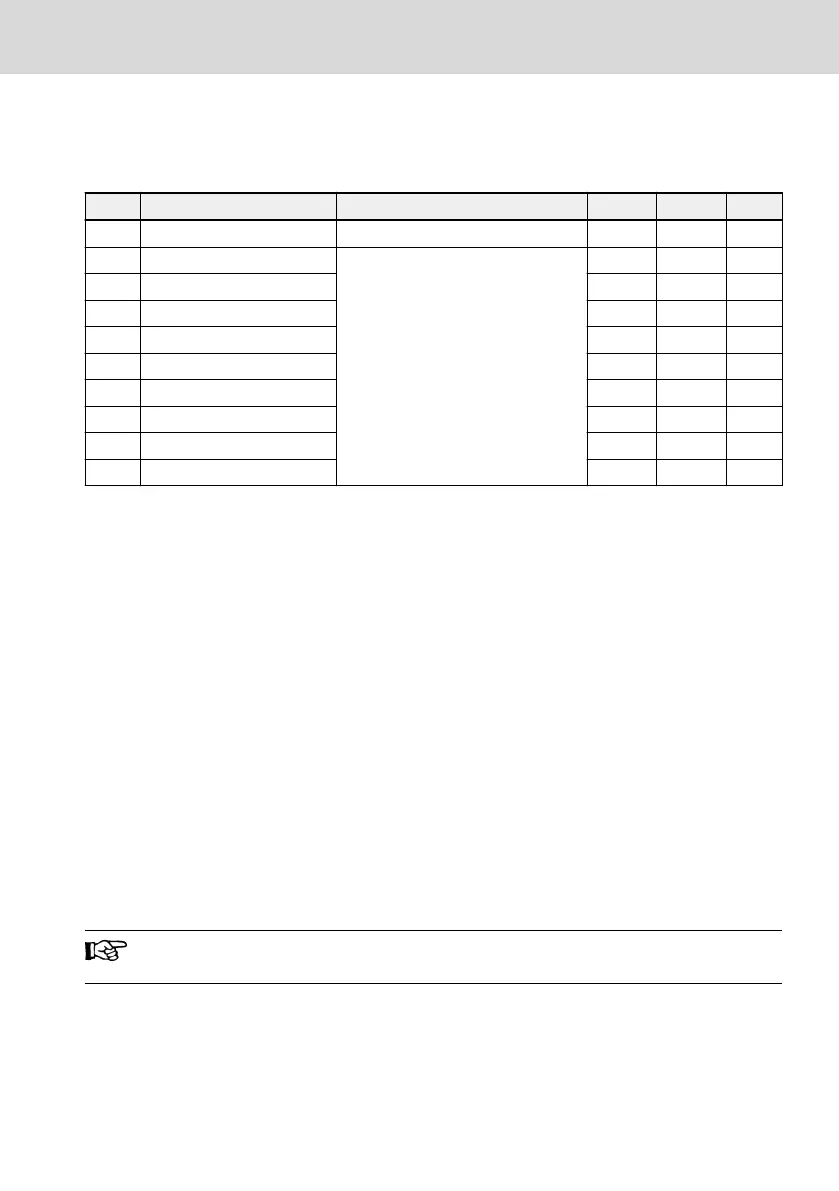
Code Name Setting range Default Min. Attri.
E0.50 Stop mode 0...2 0 – Stop
E1.00 X1 input
15: Freewheeling stop activation
35 – Stop
E1.01 X2 input 36 – Stop
E1.02 X3 input 0 – Stop
E1.03 X4 input 0 – Stop
E1.04 X5 input 0 – Stop
H8.00 EX1 input 0 – Stop
H8.01 EX2 input 0 – Stop
H8.02 EX3 input 0 – Stop
H8.03 EX4 input 0 – Stop
● [E0.50] = 0: Deceleration stop
The motor decelerates to stop according to the defined deceleration time.
If 'Output frequency' is lower than [E0.52] 'Stop DC-braking initial frequency'
and 'Stop DC-braking time' [E0.53] ≠ 0, and then DC-braking is activated. The
'Stop DC-braking current' is decided by [E0.54].
● [E0.50] = 1: Freewheeling stop
Once the stopping command is activated, the converter stops output and the
motor mechanically freewheels to stop.
'Freewheeling stop' can also be activated by digital inputs. When the digital
input signal is active, the frequency converter freewheels to stop. If the digital
input signal is inactive and a run command is active, the frequency converter
resumes the previous running status.
● [E0.50] = 2: Freewheeling with stop command, decelerating with direction
change
– When stopping command is active, the motor freewheels to stop as [E0.50]
= 1.
– When direction command is changed during running, the motor deceler-
ates to stop according to the defined deceleration time as [E0.50] = 0.
If an error occurs due to too fast deceleration, increase the decelera-
tion time or calculate if additional resistor braking is necessary.
EFC x610 Series Bosch Rexroth AG
Functions and Parameters
DOK-RCON03-EFC-X610***-IT05-EN-P
159/389
 Loading...
Loading...






