12.11 Asynchronous Motor(ASM) Control
12.11.1 Motor Parameterization
Nameplate parameters configuration
Most of motor data are available on the motor nameplate, based on which the
following parameters of the frequency converter need to be set accordingly.
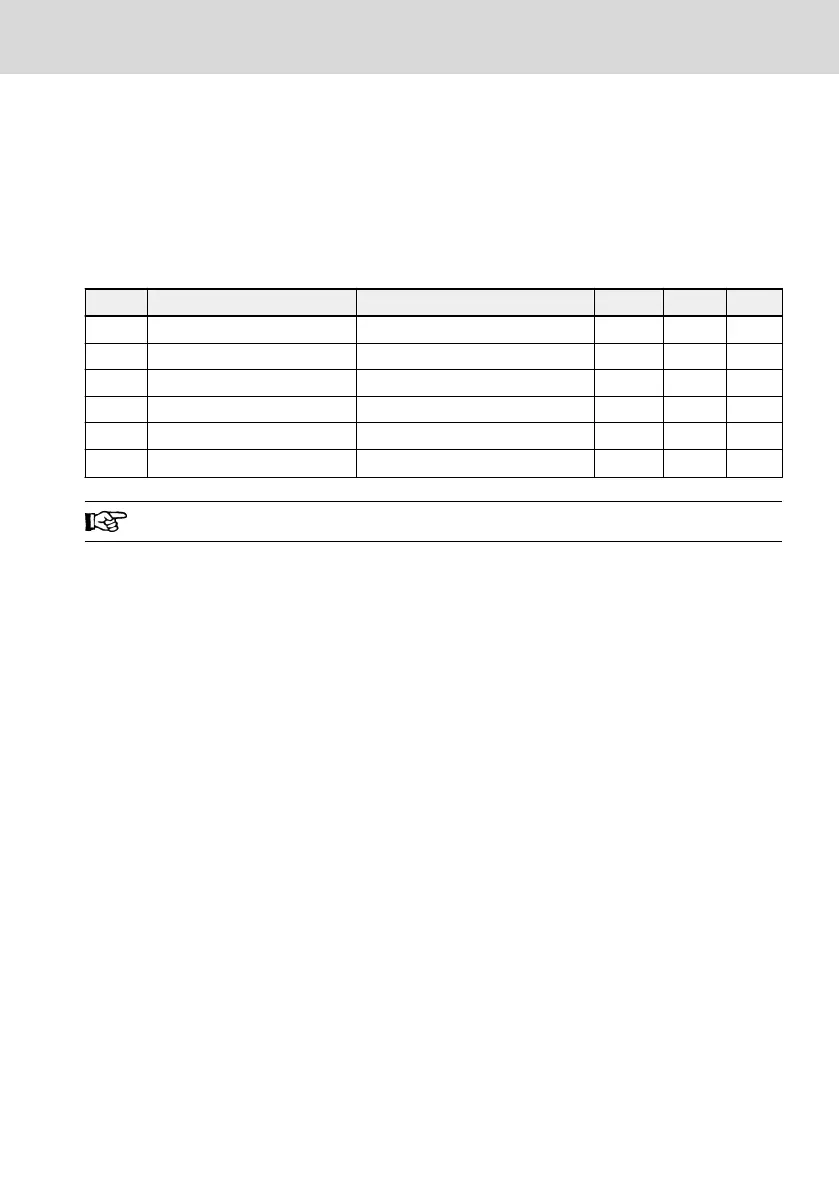
Code Name Setting range Default Min. Attri.
C1.05 Motor rated power 0.1...1,000.0 kW DOM 0.1 Stop
C1.06 Motor rated voltage 0...480 V DOM 1 Stop
C1.07 Motor rated current 0.01...655.00 A DOM 0.01 Stop
C1.08 Motor rated frequency 5.00...400.00 Hz 50.00 0.01 Stop
C1.09 Motor rated speed 1...30,000 DOM 1 Stop
C1.10 Motor rated power factor
0.00...0.99
①
0.00 0.00 Stop
①
: 0.00: Automatically identified; 0.01...0.99: Power factor setting.
If the data for 'Motor rated power factor' C1.10 is not available on the motor
nameplate, keep its default setting '0.00: Automatically identified'. However, the
rotational auto-tuning performance may be affected.
Motor slip frequency configuration
This function is available in both V/f control and SVC control, used to compen-
sate the deviation between the motor speed and the synchronous speed caused
by the load. In addition, the mechanical performance of the motor can be im-
proved with this function.
For V/f control, slip compensation does not work in acceleration, deceleration,
DC-braking processes or regenerative mode.
For SVC control, slip compensation is always active.
EFC x610 Series
Bosch Rexroth AG
Functions and Parameters
DOK-RCON03-EFC-X610***-IT05-EN-P
211/389

 Loading...
Loading...





