12.6.2 Jog Function
The 'Jog command' has a higher priority than and is independent of the 'Run /
Stop command'. This function can ONLY be set by digital input or communica-
tion. To use this function, take the following steps:
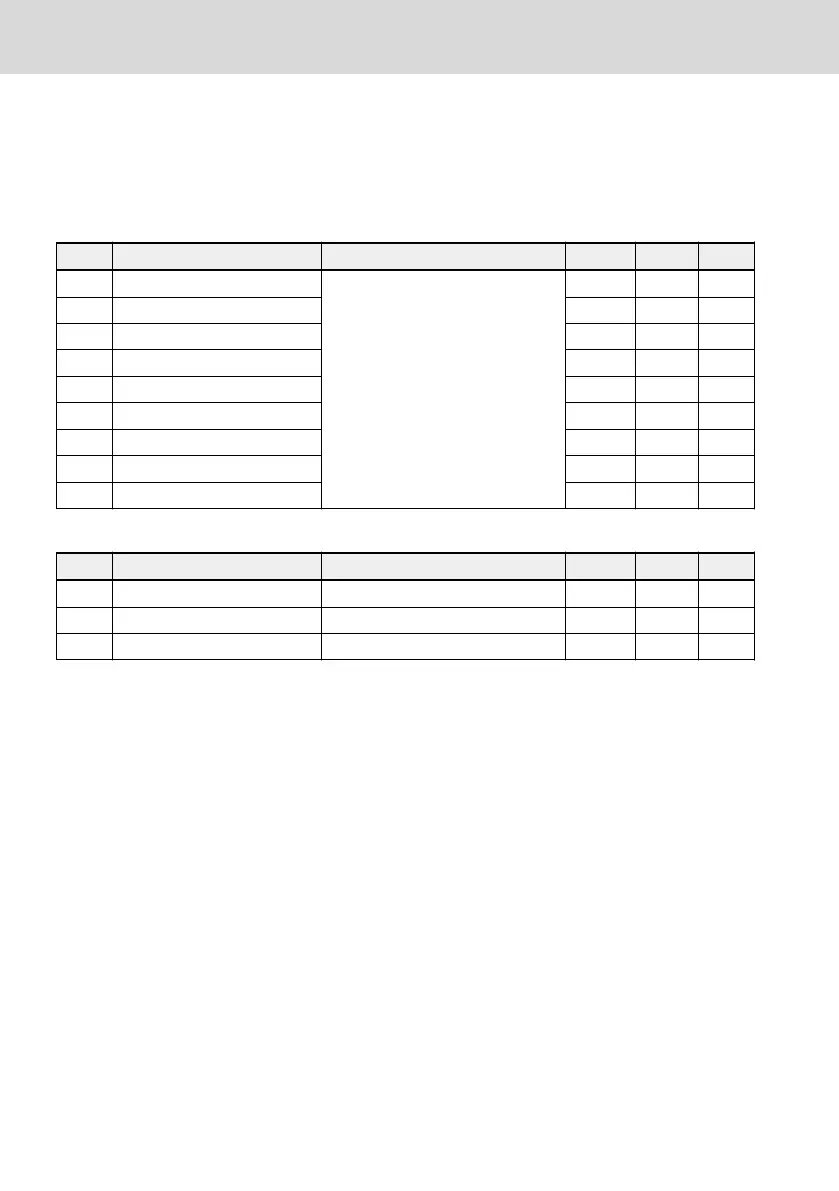
Step 1: Select any 2 digital inputs
Code Name Setting range Default Min. Attri.
E1.00 X1 input
37: Forward jog
38: Reverse jog
35 – Stop
E1.01 X2 input 36 – Stop
E1.02 X3 input 0 – Stop
E1.03 X4 input 0 – Stop
E1.04 X5 input 0 – Stop
H8.00 EX1 input 0 – Stop
H8.01 EX2 input 0 – Stop
H8.02 EX3 input 0 – Stop
H8.03 EX4 input 0 – Stop
Step 2: Set respective parameters
Code Name Setting range Default Min. Attri.
E0.60 Jog frequency 0.00...[E0.08] Hz 5.00 0.01 Run
E0.61 Jog acceleration time 0.1...6,000.0 s 5.0 0.1 Run
E0.62 Jog deceleration time 0.1...6,000.0 s 5.0 0.1 Run
Once the 'Jog command' is active, the frequency converter runs immediately to
[E0.60] 'Jog frequency' with acceleration / deceleration time defined by 'Jog ac-
celeration time' [E0.61] / 'Jog deceleration time' [E0.62] no matter the convert-
er is running or not. When 'Jog command' is inactive, the motor resumes the
previous status.
● Converter is at stop
– 'Jog command' active: Accelerate to [E0.60] 'Jog frequency' according to
[E0.61] 'Jog acceleration time'.
– 'Jog command' inactive: Deceleration time is according to [E0.62] 'Jog de-
celeration time'.
● Converter is running
– 'Output frequency' is higher than 'Jog frequency'
– 'Jog command' active: Decelerate to [E0.60] 'Jog frequency' according
to [E0.62] 'Jog deceleration time'.
– 'Jog command' inactive: Accelerate to previous 'Setting frequency' ac-
cording to [E0.26] 'Acceleration time'.
– 'Output frequency' is lower than 'Jog frequency'
Bosch Rexroth AG
Functions and Parameters
EFC x610 Series
166/389
DOK-RCON03-EFC-X610***-IT05-EN-P
 Loading...
Loading...






