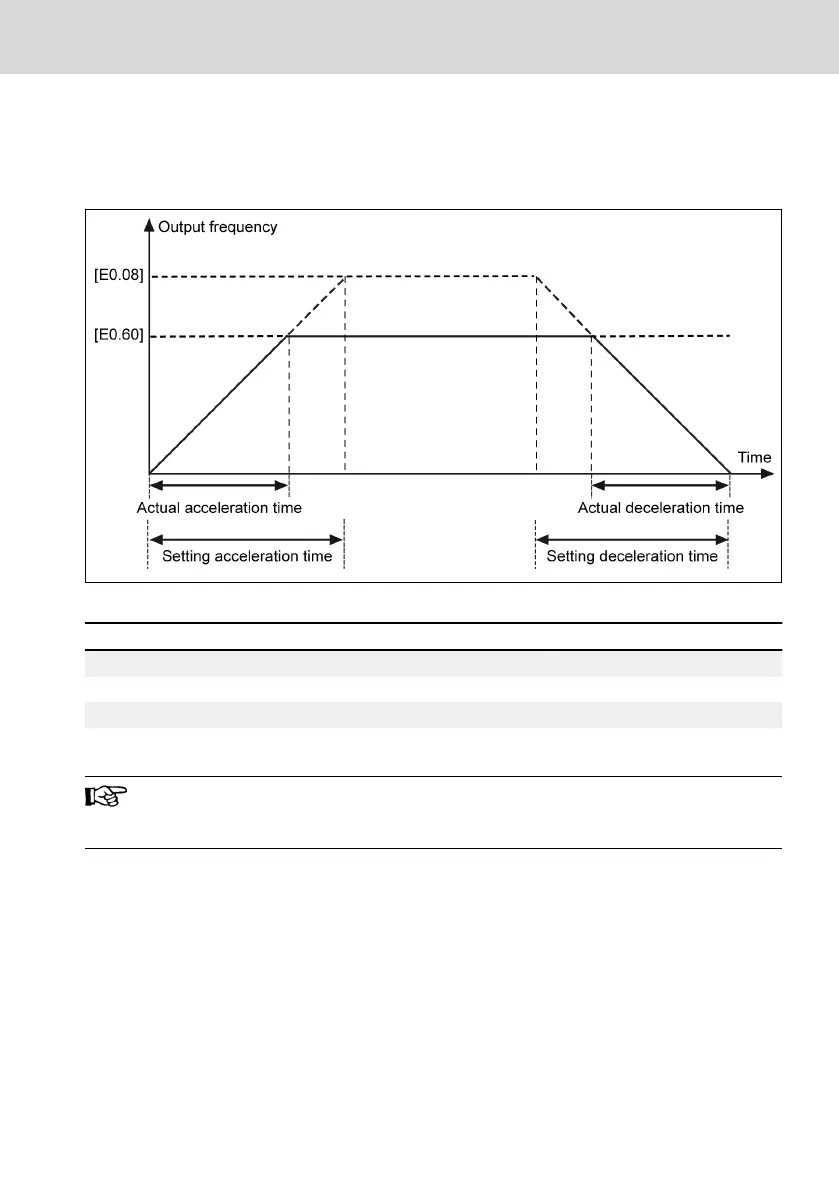
– 'Jog command' active: Accelerate to [E0.60] 'Jog frequency' according to
[E0.61] 'Jog acceleration time'.
– 'Jog command' inactive: Decelerate to prior 'Setting frequency' accord-
ing to [E0.27] 'Deceleration time'.
Fig. 12-33: Jog acceleration / deceleration time
Forward jog Reverse jog Running status
Active Active Stop
Active Inactive Jog forward
Inactive Active Jog reverse
Tab. 12-10: Jog configuration
If the jog command direction does not match the current jog running
direction, the converter will stop according to [E0.50] 'Stopping
mode'.
EFC x610 Series Bosch Rexroth AG
Functions and Parameters
DOK-RCON03-EFC-X610***-IT05-EN-P
167/389
 Loading...
Loading...






