4.8 Auto-Tuning
190 YASKAWA SIEPC71061705H GA700 Series Technical Manual
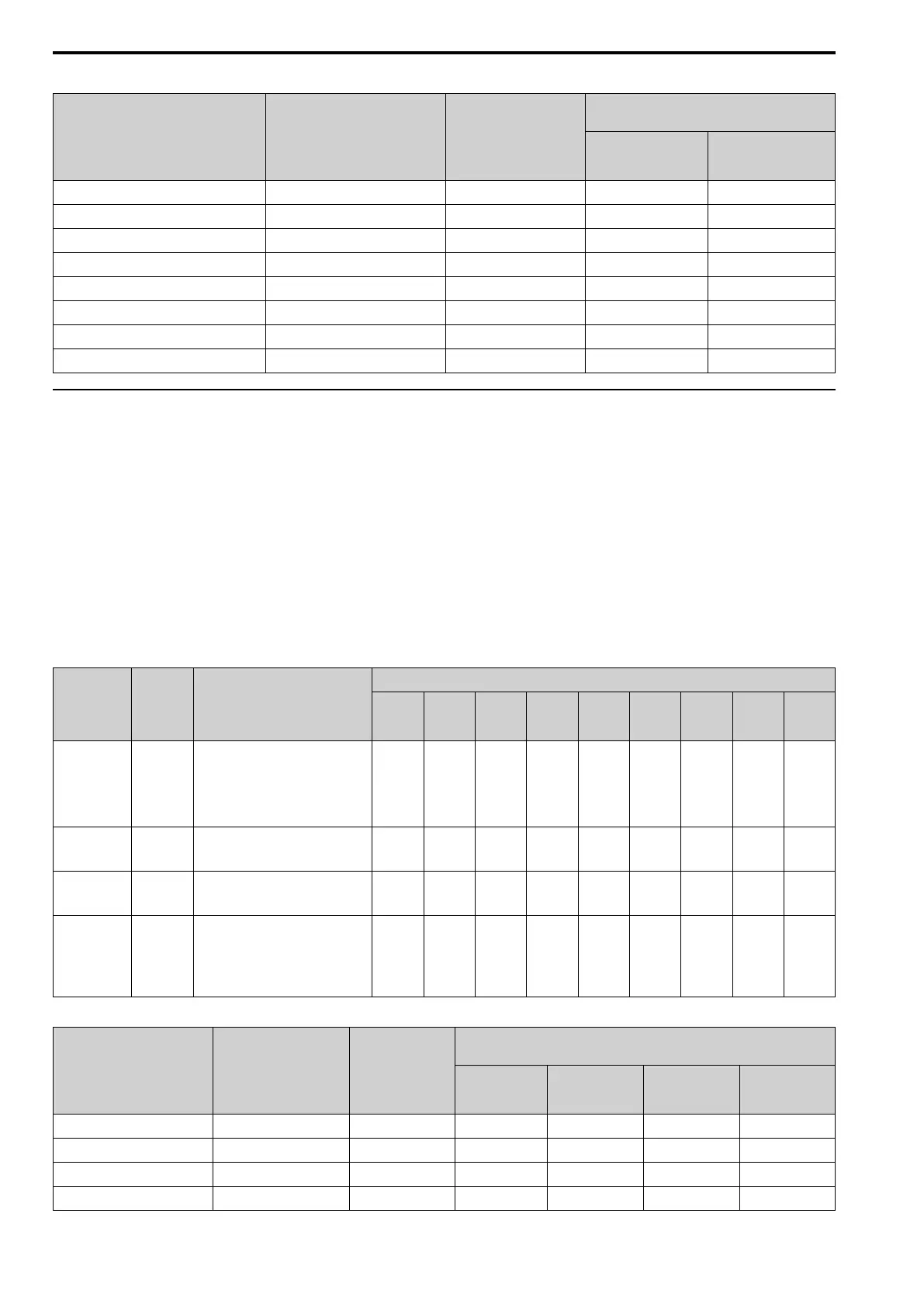
Table 4.12 Auto-Tuning Input Data in EZ Open Loop Vector Control Method
Input Data Parameter Unit
Auto-Tuning Mode
(T4-01 Setting)
Motor Parameter
Setting
(0)
Line-to-Line
Resistance
(1)
Motor Type Selection T4-02 - x -
Motor Max Revolutions T4-03 min
-1
x -
Motor Rated Revolutions T4-04 min
-1
x -
Motor Rated Frequency T4-05 Hz x -
Motor Rated Voltage T4-06 V x -
Motor Rated Current (FLA) T4-07 A x x
PM Motor Rated Power (kW) T4-08 kW x x
Number of Motor Poles T4-09 - x -
◆ Control Tuning
To increase drive responsiveness and prevent hunting, use Auto-Tuning to automatically adjust the control-related
parameters.
These types of Auto-Tuning are available for the control system:
• Inertia Tuning
• ASR Tuning
• Deceleration Rate Tuning
• KEB Tuning
Note:
If you do Control Tuning, you cannot set H1-xx = 16 [Motor 2 Selection]. Do not do Control Tuning for applications that switch
between motor 1 and motor 2.
Table 4.13 Control Loop Tuning Selection
Mode T3-00
Application Conditions and
Benefits
Applicable Control Method (A1-02 Value)
V/f
(0)
CL-V/f
(1)
OLV
(2)
CLV
(3)
AOLV
(4)
OLV/PM
(5)
AOLV/
PM
(6)
CLV/PM
(7)
EZOLV
(8)
Inertia Tuning 0
• For Feed Forward Control
• When L2-29 = 1 [Kinetic Energy
Backup Method = Single Drive
KEB Ride-Thru 2].
• When MFDI H1-xx = 7A [KEB
Ride-Thru 2 Activate (N.C.)].
- - - x - - - x -
ASR Tuning 1
To let the set response frequency
(including Inertia Tuning)
automatically adjust the ASR gain.
- - - x - - - x -
Deceleration
Rate Tuning
2
To automatically adjust the
deceleration rate to prevent an ov
[Overvoltage] fault.
x x x x x x x x x
KEB Tuning 3
• To automatically adjust parameter
settings to prevent an ov
[Overvoltage] fault with the KEB
Ride-Thru function.
• When L3-11 = 1 [Overvoltage
Suppression Select = Enabled].
x x x x x x x x x
Table 4.14 Input Data for Control Tuning
Input Data Parameters Unit
Auto-Tuning Mode
(T3-00 Value)
Inertia Tuning
(0)
ASR (Speed
Regulator)
(1)
Dec Rate Tuning
(2)
KEB Tuning
(3)
Test Signal Frequency T3-01 Hz x x - -
Test Signal Amplitude T3-02 Rad x x - -
Motor Inertia T3-03 Kg∙m
2
x x - -
System Response Frequency T3-04 Hz - x - -

 Loading...
Loading...









