12.8 H: Terminal Functions
864 YASKAWA SIEPC71061705H GA700 Series Technical Manual
■ H5-28: Function 5A Register 4 Selection
No.
(Hex.)
Name Description
Default
(Range)
H5-28
(158C)
RUN
Function 5A Register 4
Selection
Returns the contents of the specified MEMOBUS/Modbus communications register when
responding to the master device.
0049H (U1-10)
(0000H - FFFFH)
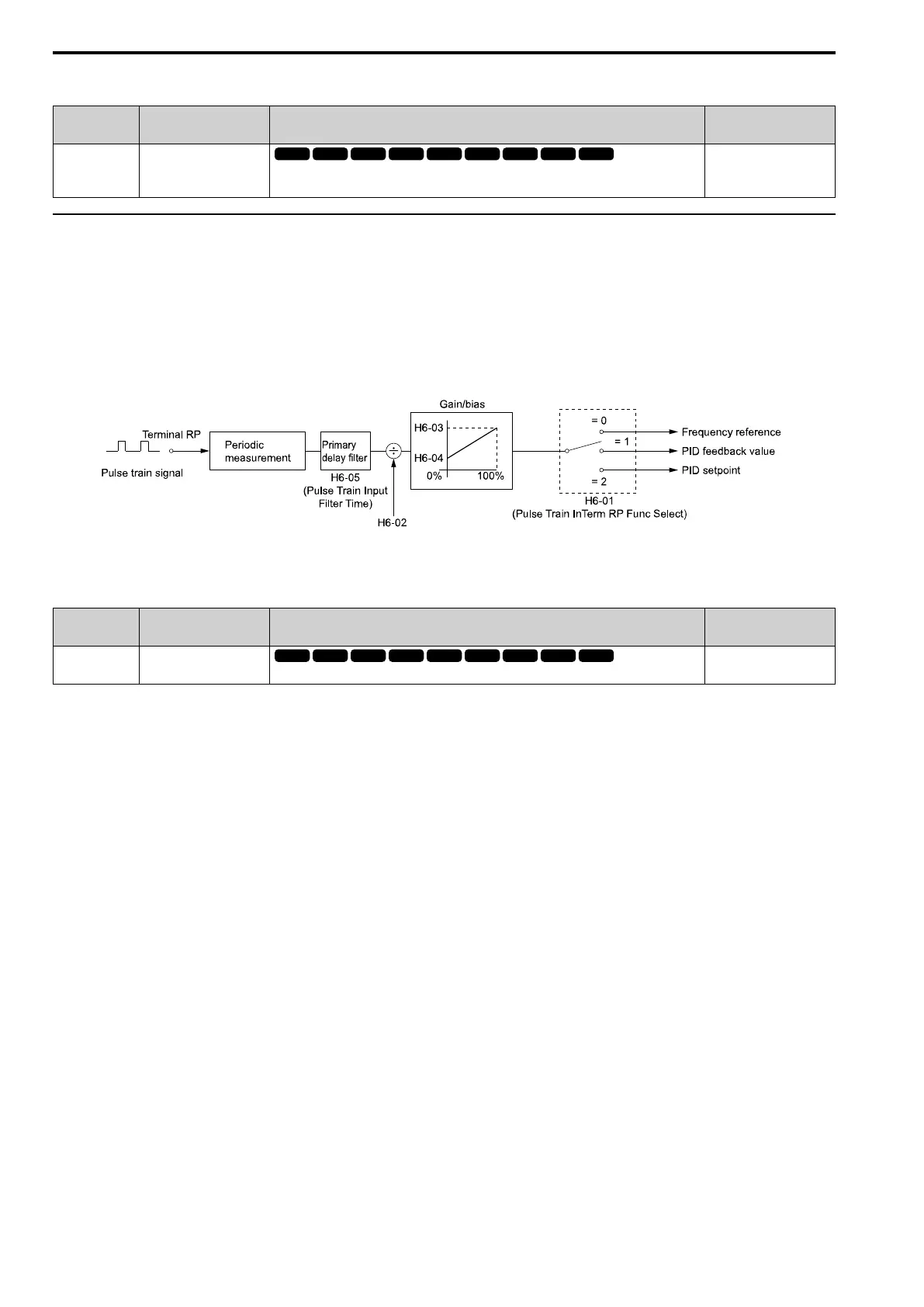
◆ H6: Pulse Train Input/Output
H6 parameters set the drive pulse train input and pulse train monitor. These parameters select input and monitor
parameters and adjust the pulse train frequency.
A pulse train signal with a maximum single pulse of 32 kHz can be input to the drive input terminal RP. You can
use the pulse train signal as the frequency reference, PID feedback value, PID setpoint value, and speed feedback
for V/f Control mode.
A pulse train signal with a maximum frequency of 32 kHz can be output from the drive output terminal MP as the
monitor value. Sinking mode and sourcing mode are supported.
Figure 12.116 Pulse Train Input Block Diagram
■ H6-01: Terminal RP Pulse Train Function
No.
(Hex.)
Name Description
Default
(Range)
H6-01
(042C)
Terminal RP Pulse Train
Function
Sets the function for pulse train input terminal RP.
0
(0 - 3)
0 : Frequency Reference
When b1-01 = 4 [Frequency Reference Selection 1 = Pulse Train Input] or b1-15 = 4 [Frequency Reference
Selection 2 = Pulse Train Input], the drive inputs the frequency reference received from terminal RP.
1 : PID Feedback Value
The drive inputs the PID control feedback value received from terminal RP.
2 : PID Setpoint Value
The drive inputs the PID control target value received from terminal RP.
3 : Speed Feedback (V/F Control)
Select V/f Control method to enable simple encoder feedback.
Use motor speed feedback for better speed control precision. The drive compares the frequency reference to the
motor speed feedback received from the encoder, and uses the ASR function to compensates for motor slip. You
cannot use input terminal RP used for the simple encoder to detect the direction of motor rotation. Use a different
method to detect motor rotation.
Use these methods to detect the direction of motor rotation.
• Use MFDI
Set MFDI H1-xx = 7E [Reverse Rotation Identifier]. When the configured terminal is activated, the motor
operates in Reverse run. When the terminal is deactivated, the motor operates in Forward run.
Use an encoder that outputs 2-tracks (phase A, B) to detect the direction of motor rotation.
• Use the frequency reference
When you do not use the MFDI, the Forward/Reverse run command is the same as the direction of motor
rotation.
Figure 12.117 shows speed control in Simple Closed Loop V/f Mode.

 Loading...
Loading...









