4.10 Fine Tuning during Test Runs (Adjust the Control Function)
202 YASKAWA SIEPC71061705H GA700 Series Technical Manual
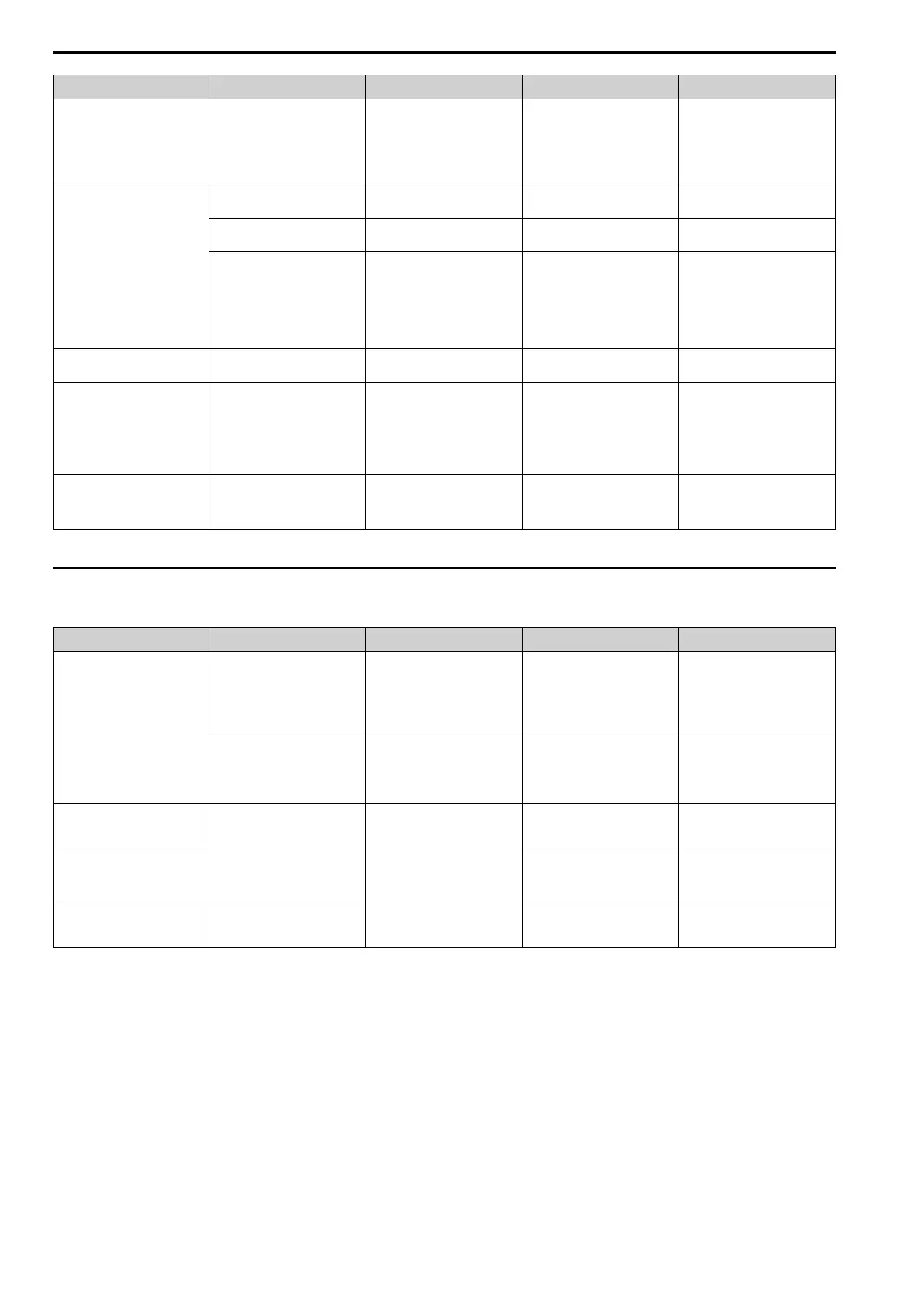
Issue Parameter Number Possible Solutions Default Recommended Setting
There is too much current during
deceleration.
n8-79 [Pull-in Current at
Deceleration]
Set n8-79 < n8-51.
50%
Note:
When n8-79 = 0, the drive
will apply the n8-51 setting to
the pull-in current during
deceleration.
Decrease in increments of 5%.
Stalling or oscillation occurs
when you apply the load during
constant speed
n8-47 [Pull-in Current Comp
Filter Time]
Decrease the setting value in
increments of 0.2 s.
5.0 s -
n8-48 [Pull-in/Light Load Id
Current]
Increase the setting value in
increments of 5%.
30% -
n8-55 [Motor to Load Inertia
Ratio]
Increase the setting value.
Note:
When you operate a single
motor or with a minimum
quantity of inertia, if you set
this value too high, it can
cause motor oscillation.
0 Near the load inertia ratio.
Hunting or oscillation
n8-45 [Speed Feedback Detection
Gain]
Increase the setting value in
increments of 0.05.
0.80 -
The drive detects STPo [Motor
Step-Out Detected] fault when
the load is not too high.
• E5-09 [PM Back-EMF Vpeak
(mV/(rad/s))]
• E5-24 [PM Back-EMF L-L
Vrms (mV/rpm)]
• Adjust the setting value.
• Examine the motor code on
the motor nameplate or the
data sheet, then set correct
values for E5-09 or E5-24.
*1
• Yaskawa motor
Set the motor code from the
motor nameplate.
• Motor from another
manufacturer
Set the values from the test
report.
The drive detected stalling or
STPo [Motor Step-Out Detected]
at high speed and maximum
output voltage.
n8-62 [Output Voltage Limit
Level]
Set to a value lower than the
actual input voltage.
• 200.0 V
• 400.0 V
-
*1 The default setting changes when the settings for E5-01 [Motor Code Selection] and o2-04 [Drive Model (KVA) Selection] change.
◆ Advanced Open Loop Vector Control Method for PM Motors
Table 4.22 Parameters for Fine Tuning the Drive (A1-02 = 6 [AOLV/PM])
Issue Parameter Number Possible Solutions Default Recommended Setting
• Unsatisfactory motor torque
and speed response
• Hunting or oscillation
• High speed
C5-01 [ASR Proportional Gain
1]
• Low speed
C5-03 [ASR Proportional Gain
2]
• If torque or speed response are
slow, increase the setting value
in increments of 5.00.
• If hunting or oscillation occur,
decrease the setting value.
10.00 5.00 to 30.00
*1
• High speed
C5-02 [ASR Integral Time 1]
• Low speed
C5-04 [ASR Integral Time 2]
• If torque or speed response are
slow, decrease the setting
value.
• If hunting or oscillation occur,
increase the setting value.
0.500 s 0.300 s to 1.000 s
*1
The drive cannot find ASR
proportional gain or integral time
for low speed or high speed.
C5-07 [ASR Gain Switchover
Frequency]
Change the ASR proportional
gain and ASR integral time to
conform to the output frequency.
0.0% 0.0% to maximum rotation speed
Hunting or oscillation C5-06 [ASR Delay Time]
If the rigidity of the machine is
unsatisfactory and vibration is
possible, increase the setting
value in increments of 0.010.
0.016 s 0.016 s to 0.035 s
*1
Step-out
E1-xx parameters, E5-xx
parameters
Refer to the motor nameplate or
test report and set E1-xx or E5-xx
correctly.
- -
*1 The best values for a no-load operation are different than the best values for actual loading operation.

 Loading...
Loading...









