4.10 Fine Tuning during Test Runs (Adjust the Control Function)
200 YASKAWA SIEPC71061705H GA700 Series Technical Manual
◆ Closed Loop Vector Control Method
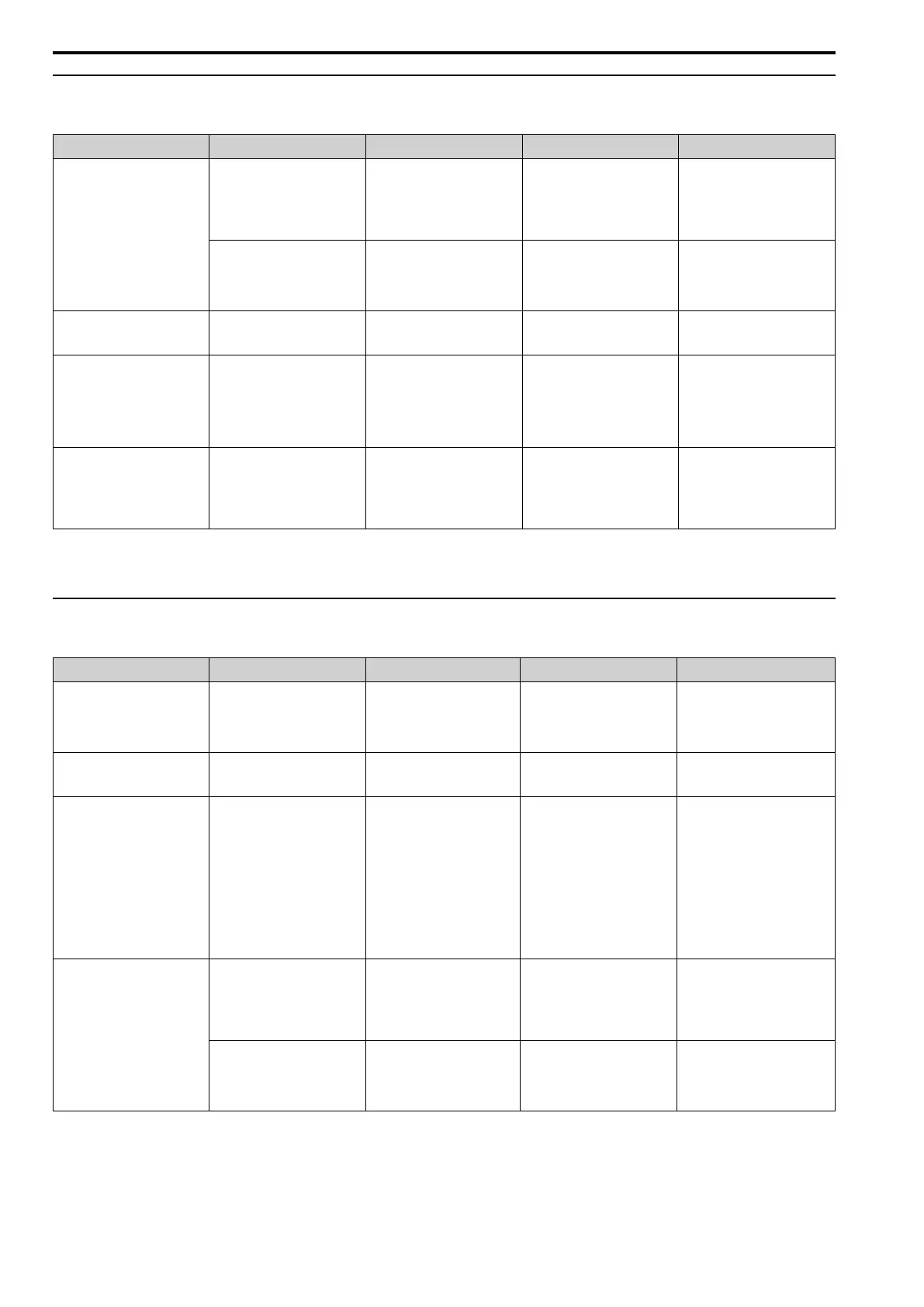
Table 4.19 Parameters for Fine Tuning the Drive (CLV)
Issue Parameter Number Possible Solutions Default Recommended Setting
• Unsatisfactory motor torque
and speed response
• Hunting or oscillation
• High speed
C5-01 [ASR Proportional Gain
1]
• Low speed
C5-03 [ASR Proportional Gain
2 (P)]
*1
• If torque or speed response are
slow, increase the setting value
in increments of 5.00.
• If hunting or oscillation occur,
decrease the setting value.
20.00 10.00 - 50.00
• High speed
C5-02 [ASR Integral Time 1]
• Low speed
C5-04 [ASR Integral Time 2
(I)]
*1
• If torque or speed response are
slow, decrease the setting
value.
• If hunting or oscillation occur,
increase the setting value.
0.500 s 0.300 s to 1.000 s
The drive cannot find ASR
proportional gain or integral time
for low speed or high speed.
C5-07 [ASR Gain Switchover
Frequency]
*1
Change the ASR proportional
gain and ASR integral time to
conform to the output frequency.
0.0 Hz
0.0 Hz to maximum output
frequency
Hunting or oscillation C5-06 [ASR Delay Time]
*1
• If torque or speed response are
slow, decrease the setting
value in increments of 0.010.
• If the rigidity of the machine is
unsatisfactory and vibration is
possible, increase the setting
value.
0.004 s 0.004 s to 0.020 s
• The volume of the motor
excitation sound is too high.
• Hunting or oscillation at low
speeds (3 Hz or lower)
C6-02 [Carrier Frequency
Selection]
• If the volume of the motor
excitation sound is too high,
increase the carrier frequency.
• If hunting or oscillation occur
at low speeds, decrease the
carrier frequency.
1 (2.0 kHz)
*2
2.0 kHz to upper limit value
*1 Refer to the section on C5-xx parameters for more information about speed control (ASR).
*2 The default setting changes when the settings for C6-01 [Normal / Heavy Duty Selection] and o2-04 [Drive Model (KVA) Selection]
change.
◆ Advanced Open Loop Vector Control Method
Table 4.20 Parameters for Fine Tuning the Drive (AOLV)
Issue Parameter Number Possible Solutions Default Recommended Setting
• oS [Overspeed] occurs.
• Hunting or oscillation.
T1-01 [Auto-Tuning Mode
Selection]
• Make sure that the output of
the drive and the motor are
connected correctly.
• Do Rotational Auto-Tuning
for a single motor.
- 0
The volume of the motor
excitation sound is too high.
C6-02 [Carrier Frequency
Selection]
If the volume of the motor
excitation sound is too high,
increase the carrier frequency.
1 (2 kHz)
*1
1 to upper limit value
Speed precision is unsatisfactory E2-02 [Motor Rated Slip]
• Decouple the motor and
machine and do Rotational
Auto-Tuning.
• If the motor speed is slow,
increase the value of E2-02 in
small increments
(approximately 0.1% of the
default setting value).
• If the motor speed is fast,
decrease the value of E2-02 in
small increments
(approximately 0.1% of the
default setting value).
*2
Set to a value that is ±5% of the
current value.
• Unsatisfactory motor torque
and speed response
• Hunting or oscillation
• High speed
C5-01 [ASR Proportional Gain
1]
• Low speed
C5-03 [ASR Proportional Gain
2 (P)]
*3
• If torque or speed response are
slow, increase the setting
value in increments of 5.00.
• If hunting or oscillation occur,
decrease the setting value.
• C5-01 = 10.00
• C5-03 = 20.00
10.00 to 50.00
• High speed
C5-02 [ASR Integral Time 1]
• Low speed
C5-04 [ASR Proportional Gain
2 (P)]
*3
• If torque or speed response are
slow, decrease the setting
value.
• If hunting or oscillation occur,
increase the setting value.
0.500 s 0.300 s to 1.000 s

 Loading...
Loading...









