Troubleshooting
7
7.4 Fault
YASKAWA SIEPC71061705H GA700 Series Technical Manual 343
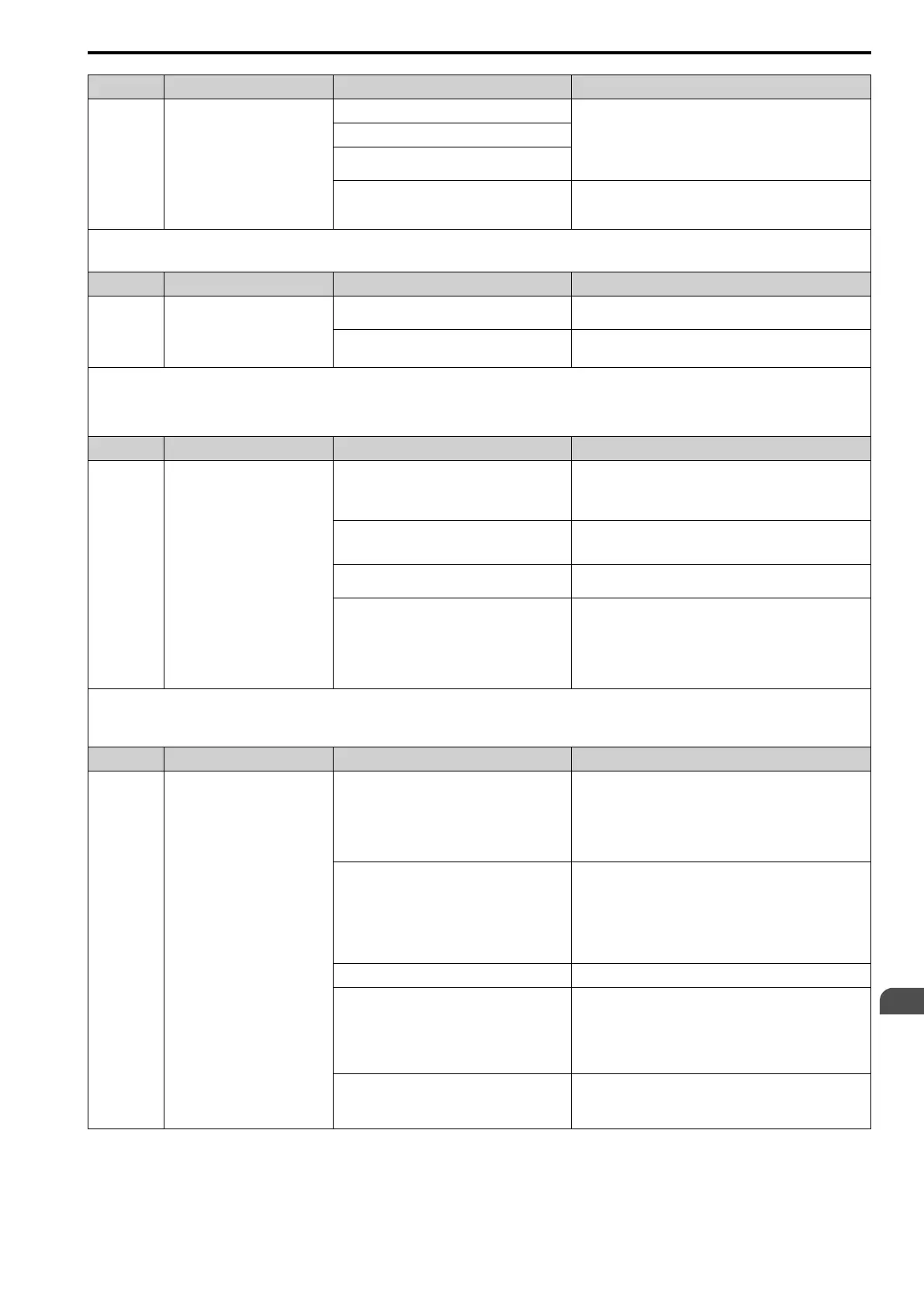
Code Name Causes Possible Solutions
oL7 High Slip Braking Overload
The load inertia is too large.
An external force on the load side rotated the motor.
Something is preventing deceleration on the load
side.
• Decrease deceleration times in C1-02, C1-04, C1-06, and C1-
08 [Deceleration Times] for applications that do not use High
Slip Braking.
• Use a braking resistor to decrease the deceleration time.
The value set in n3-04 [HSB Overload Time] is too
small.
• Increase the value set in n3-04.
• Connect a thermal overload relay to the motor, and set n3-04 =
1200 s (maximum value).
Note:
• The drive detects this fault if the output frequency is constant for longer than n3-04.
• Do a Fault Reset to clear the fault.
Code Name Causes Possible Solutions
oPr Keypad Connection Fault
The keypad is not securely connected to the
connector on the drive.
Examine the connection between the keypad and the drive.
The connection cable between the drive and the
keypad is disconnected.
• Remove the keypad and then reconnect it.
• Replace the cable if damaged.
Note:
• The drive detects this fault if these conditions are correct:
–o2-06 = 1 [Keypad Disconnect Detection = Enabled].
–b1-02 = 0 [Run Command Selection 1 = Keypad], or the drive is operating in LOCAL Mode with the keypad.
• Do a Fault Reset to clear the fault.
Code Name Causes Possible Solutions
oS Overspeed
There is overshoot. • Decrease C5-01 [ASR Proportional Gain 1] and increase C5-
02 [ASR Integral Time 1].
• Adjust the pulse train gain with H6-02 to H6-05 [Pulse Train
Input Setting Parameters].
There is an incorrect number of PG pulses set in the
drive.
Set H6-02 [Terminal RP Frequency Scaling] to the pulse train
frequency during 100% reference (maximum motor rotation
speed).
The oS detection level is set incorrectly. Adjust F1-08 [Overspeed Detection Level] and F1-09 [Overspeed
Detection Delay Time].
If the drive detects the fault at start or in the low
speed range (10% or less) and n8-57 = 1 [HFI
Overlap Selection = Enabled] for PM Control
methods, the high frequency injection gain is too
high.
• Set E5-xx [PM Motor Parameters] correctly or do Rotational
Auto-Tuning.
• Decrease the value of n8-41 [HFI P Gain] in 0.5 unit
increments.
Note:
Set n8-41 > 0.0 for IPM motors.
Note:
• The drive detects this fault if the motor speed is more than the value set in F1-08 for longer than F1-09.
• Do a Fault Reset to clear the fault.
• If the drive detects this fault, it will operate the motor as specified by the Stopping Method set in F1-03 [Overspeed Detection Selection].
Code Name Causes Possible Solutions
ov Overvoltage
The deceleration time is too short and too much
regenerative energy is flowing back into the drive.
• Set L3-04 = 1 [Stall Prevention during Decel = General
Purpose].
• Increase the values set in C1-02, C1-04, C1-06, or C1-08
[Deceleration Times].
• Connect a dynamic braking option to the drive.
• Perform Deceleration Rate Tuning.
The acceleration time is too short. • Make sure that sudden drive acceleration does not cause the
fault.
• Increase the values set in C1-01, C1-03, C1-05, or C1-07
[Acceleration Times].
• Increase the value set in C2-02 [S-Curve Time @ End of
Accel].
• Set L3-11 = 1 [Overvoltage Suppression Select = Enabled].
The braking load is too large. Connect a dynamic braking option to the drive.
There are surge voltages in the input power supply. Connect a DC reactor to the drive.
Note:
If you turn the phase advancing capacitors ON and OFF and
use thyristor converters in the same power supply system,
there can be surge voltages that irregularly increase the input
voltage.
The drive output cable or motor is shorted to ground
(the current short to ground is charging the main
circuit capacitor of the drive through the power
supply).
1. Examine the motor main circuit cable, terminals, and motor
terminal box, and then remove ground faults.
2. Re-energize the drive.

 Loading...
Loading...









