Drive Configuration D2 Series Servo Drive User Manual
5-36 HIWIN MIKROSYSTEM CORP.
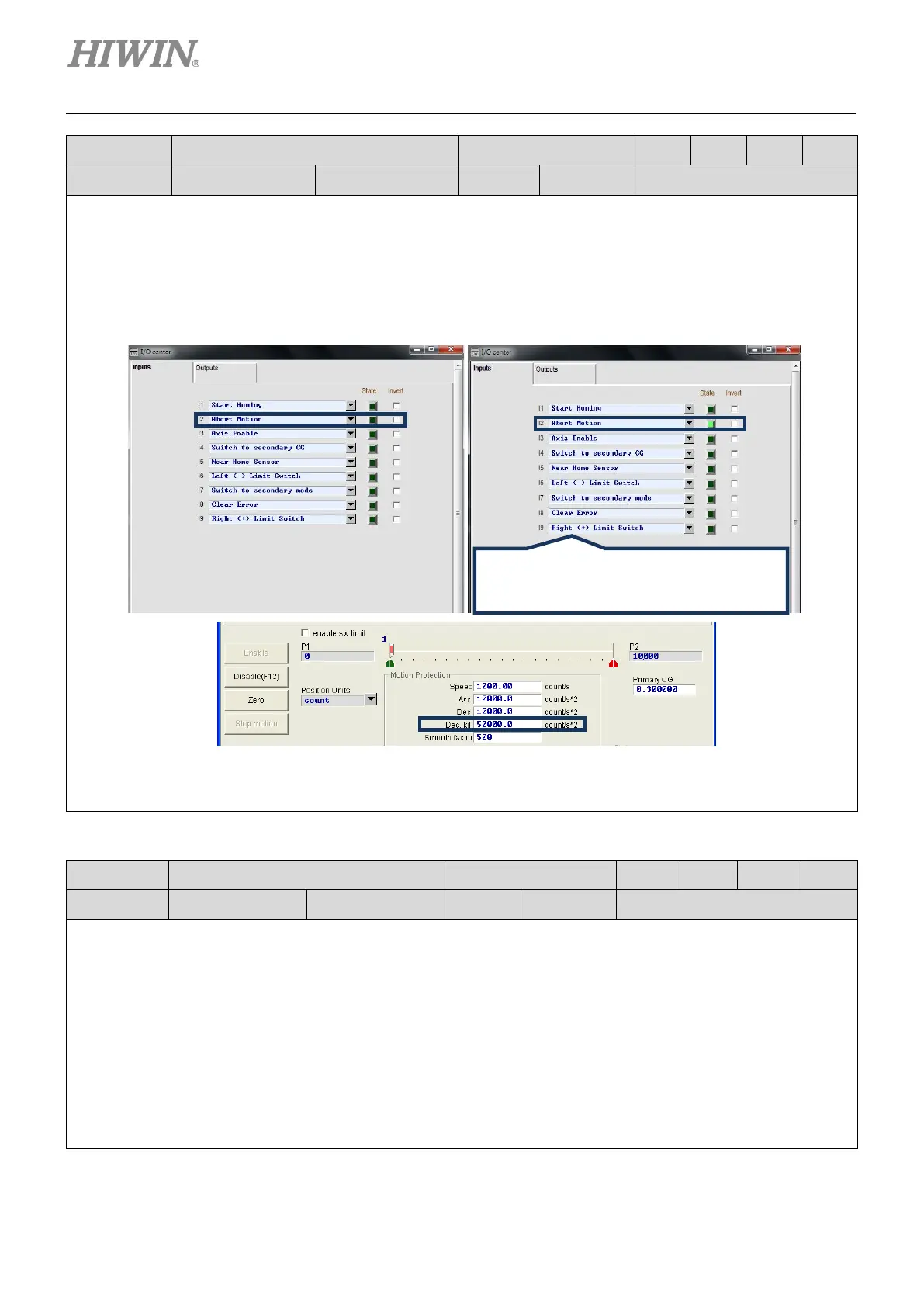
Input function Abort Motion Operation mode Pos Vel Trq Std
Symbol EMG Default input I2 Circuit Refer to 4.5.1
In the stand-alone mode, the drive will decelerate the motor to stop by using the emergency-
(Dec. kill) when this input single is triggered by the button. The emergency-
stop deceleration can be set in the
performance center.
Instructions
Select “Abort Motion” in the “Input” tab of I/O center (default is I2). Utilize the external trigger signal to stop
motor by using the emergency-stop deceleration.
When the input state of “Abort Motion” is True (the state light is green),
the drive will decelerate the motor to
stop by using the emergency-stop deceleration (Dec. kill).
Input f
Invert V Command Operation mode Pos Vel Trq Std
Symbol INVC Default input None Circuit Refer to 4.5.1
Invert the voltage command sent by the host controller.
Instructions:
Assign “Invert V Command” to the input function in the velocity o
r force/torque mode. When the input state of
“Invert V Command”
is False, the drive let the motor move in the forward direction at receiving the analog input
voltage between 0 to +10 V, and in the reversal direction at receiving the voltage between -10 to
other hand, when the input state of “Invert V Command”
is True, the drive let the motor move in the reversal
direction at receiving the voltage between 0 to +10 V, and in the reversal direction at receiving the voltage
between -10 to 0 V.
The external signal is triggered to stop the
motor by using the emergency-stop
 Loading...
Loading...

