LCD Operation D2 Series Servo Drive User Manual
7-22 HIWIN MIKROSYSTEM CORP.
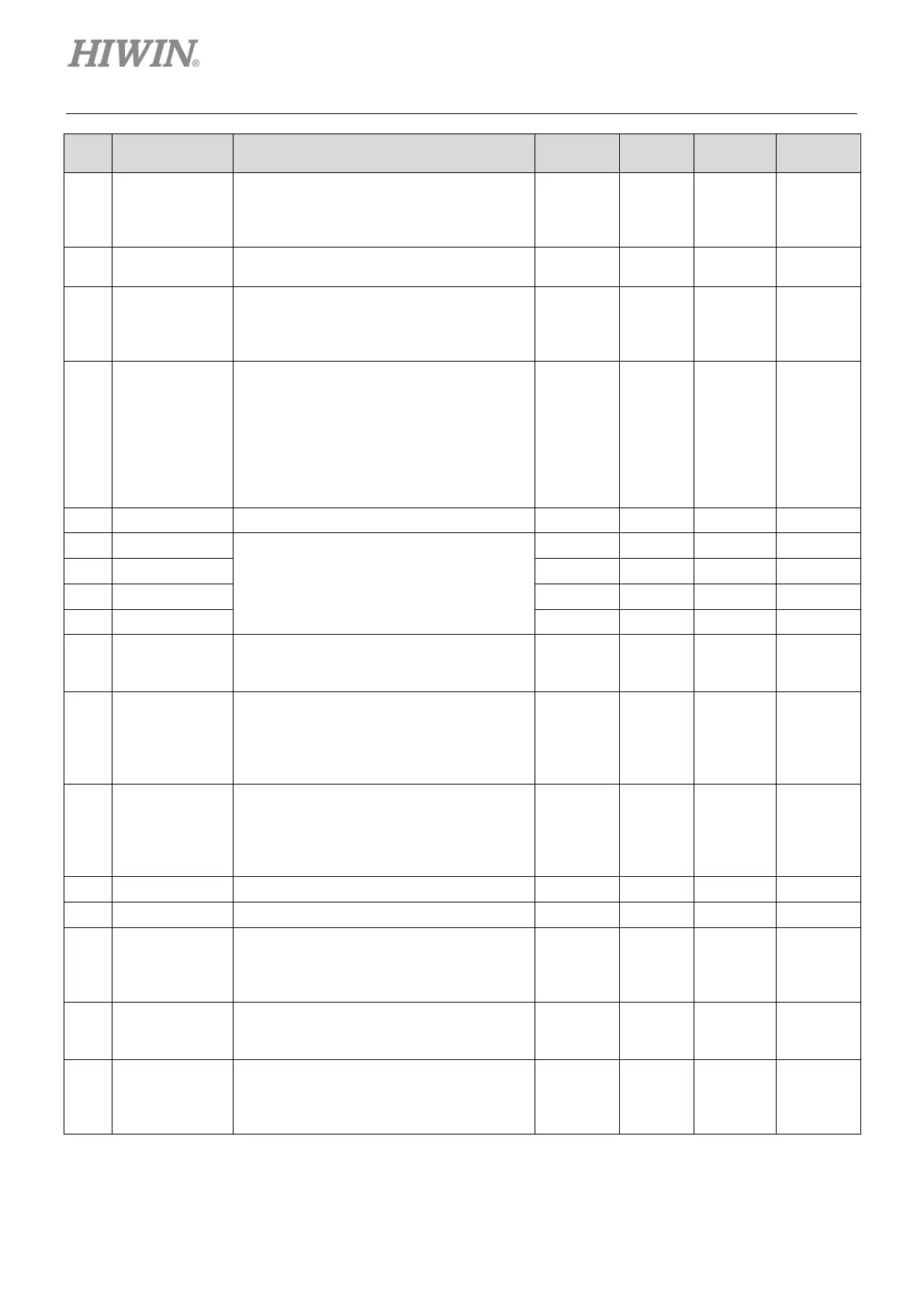
Parameter Definition Unit Default Max. Min.
185
X_home_wall_
CurrThrshld
Current threshold for searching end stop
(Note: “curr_drv_peak” is the drive’s peak
current)
amp
1000)/(cur
r_drv_pea
0 2
31
- 1 1
186
Time limitation for searching end stop
msec 0 2
31
- 1 1
187
#
X_home_select
_Speed
Initial speed setting for the second homing
mode
0: Slower speed
- 0 1 0
188
#
X_home_searc
h_option
Searching home method for the second
homing option
0: Index signal only
1: Near Home Sensor only
2: Near Home Sensor then change to
lower speed, move left, search index
3: Near Home Sensor then change to
lower speed, move right, search index
- 0 3 0
31
O4 output signal setting
15
15
15
208
out_config[19]
- 0 2
15
- 1 0
209
X_Use_Dynami
cBrk
Dynamic brake (only for D frame model)
0: Not use dynamic brake
- 0 1 0
212
#
X_oper_mode1
0: Stand-Alone
1: Position mode
2: Velocity mode
- 0 3 0
213
#
X_oper_mode2
0: Stand-Alone
1: Position mode
2: Velocity mode
- 0 3 0
-6
216
#
LCD.low_or_hig
h
Switch between the high-speed and
low-speed pulse inputs
0: High-speed pulse input
- 0 1 0
217
#
LCD.buff_inv
Invert setting of buffered encoder output
0: Not inverse
- 0 1 0
218
#
LCD.emu_or_b
uff
Switch between the buffered and emulated
encoder outputs
0: Buffered encoder output
1: Emulated encoder output
-
bit
0: for 13
1 0
 Loading...
Loading...

