D2 Series Servo Drive User Manual LCD Operation
HIWIN MIKROSYSTEM CORP. 7-23
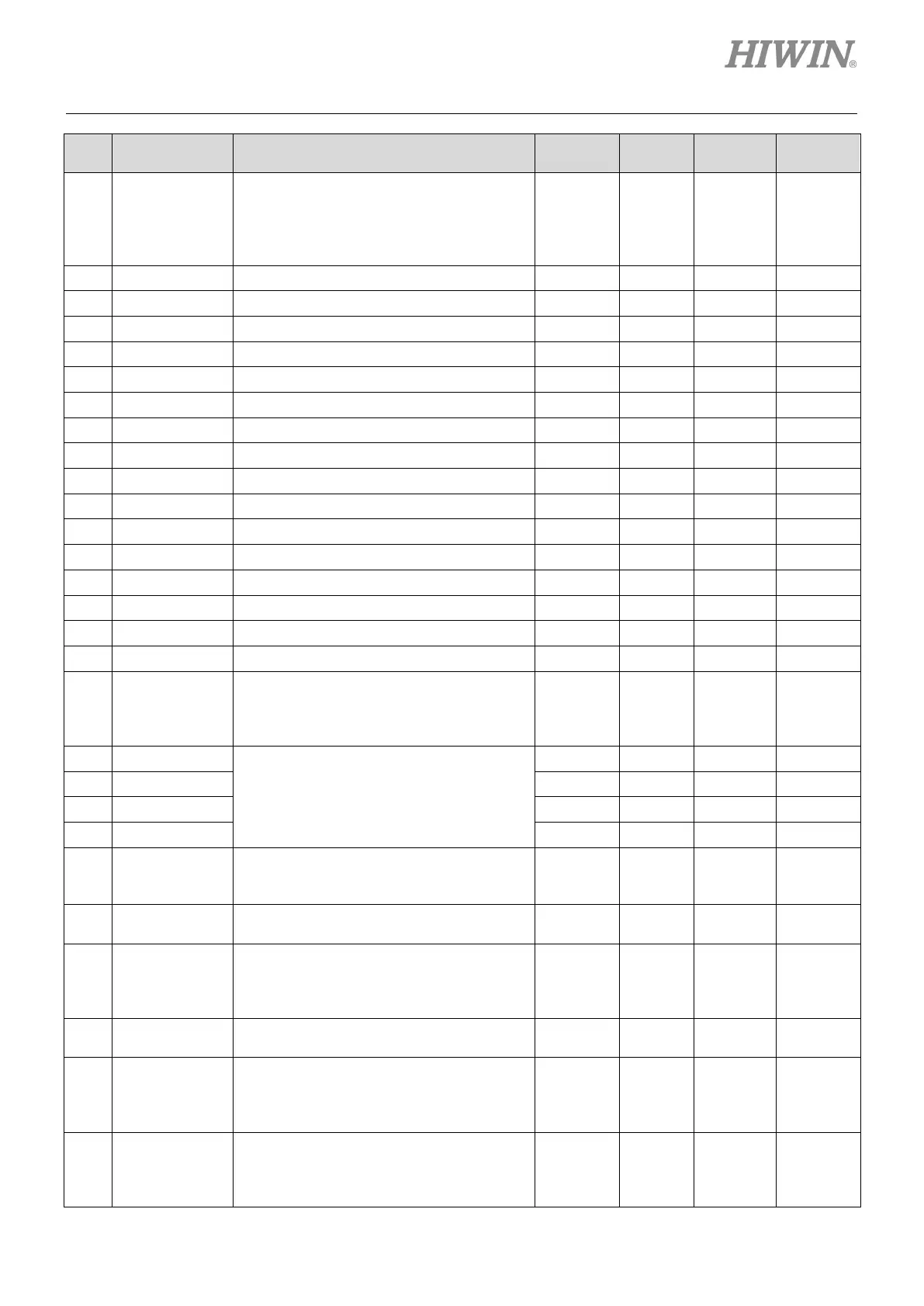
Parameter Definition Unit Default Max. Min.
219
#
LCD.cw_ccw_in
v
Switch between the positive and negative
logics for CW/CCW pulse command
(CW_CCW_INV)
0: Not inverse
- 0 1 0
#
#
#
#
#
#
#
248
#
LCD.I8_inv Invert of input 8
- 0 1 0
#
#
280
#
LCD.brk_inv Invert of CN2 BRK output
- 1 1 0
#
#
283
#
LCD.O3_inv Invert of output 3
- 0 1 0
#
#
340
#
X_ZT_loadLV
0: Tuned (gains are modified by Auto tune
or manually)
- 3 5 0
O5 output signal setting*
15
15
343
out_config [22]
- 0 2
15
- 1 0
15
345
#
X_Use2ndEnc
Enable/Disable the dual-loop control
0: Disable the dual-loop control
1: Enable the dual-loop control
- 0 1 0
346
X_cntperunit2
Linear encoder resolution of dual-loop
control
count 0 2
31
- 1 0
347
#
X_2ndEnc_sgn
Linear encoder direction of dual-loop
control
-1: Inverse
- -1 1 -1
348
Maximum tolerance of deviation input for
the hybrid control
count 16,000 2
27
1
349
#
X_VOF.FB_Swi
tch
Switch between the enable and disable the
velocity observer
0: Disable the velocity observer
1: Enable the velocity observer
- 1 1 0
353
#
X_latch_err_tdr
v
Latch the error massage of “over
temperature”
0: Disable
- 1 1 0
 Loading...
Loading...

