Commissioning
5-30
L
EDSVS9332P-C EN 3.0
Calculation of control parameters (Mode = 1)
This function only calculates control parameters.
Identification/Identification and calculation of control parameters (mode = 2 / 3)
By activating the function “Identification” or ”Identification and Calculation of control parameters”
a motion of the drive is released. Reset the controller inhibit (CINH) to release the motion after the
function has been activated. After the motion has been completed, the controller must be inhibited
again to complete the function.
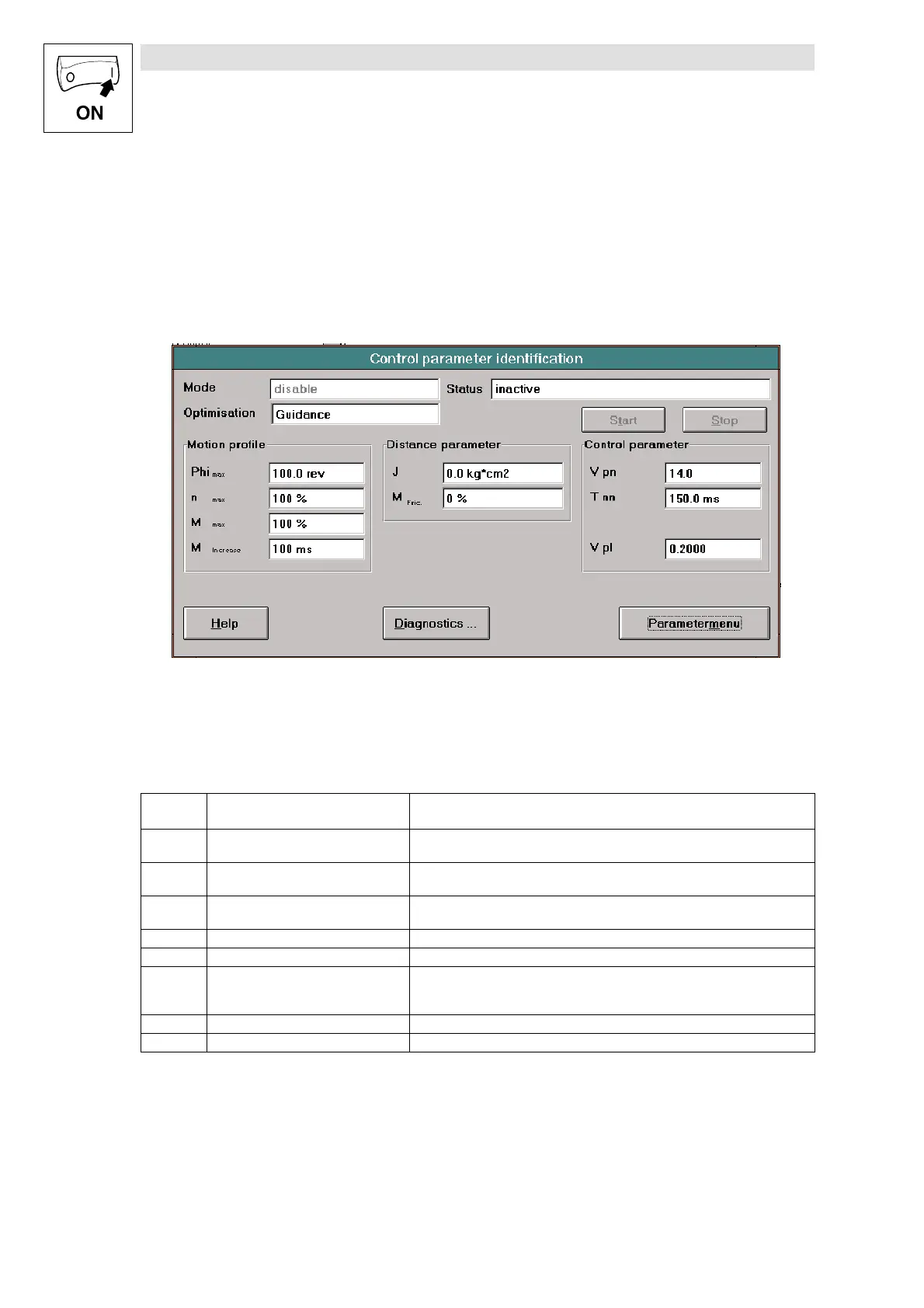
Fig. 5-22 Dialog box “Control parameter identification”
5.11.2 Troubleshooting
If an error occurs during parameter identification, the status (C1181) helps to detect the error.
Status
(C1181)
Cause Remedy
2 Control parameter calcula tion not
possible
Check whether distance parameters are set reasonably (C1187/C1188).
3 Too few scanning points. Change motion conditions (C1182-C1185), i. e. increase torque, increase number of
revolutions, increase speed, reduce torque rise time.
4 Reference torque too low
•
Increase Imax (C0022)
•
Check maximum torque (C0057)
5 Speed at start ≠ 0 Stop drive and reactivate function
6 Controller inhibit during motion Repeat identification
7 Minimum brake torque not reached
Torque ramp too flat or maximum torque
too low
Change motion conditions (C1182-C1185), i. e. increase torque, increase number of
revolutions, increase speed, reduce torque rise time.
8 Time overflow Select higher torque or shorter torque rise time
9 Blocking Release brake, check motor cable, eliminate blocking

 Loading...
Loading...






