Parameter Details
12
12.3 b: Application
YASKAWA SIEPC71061705H GA700 Series Technical Manual 669
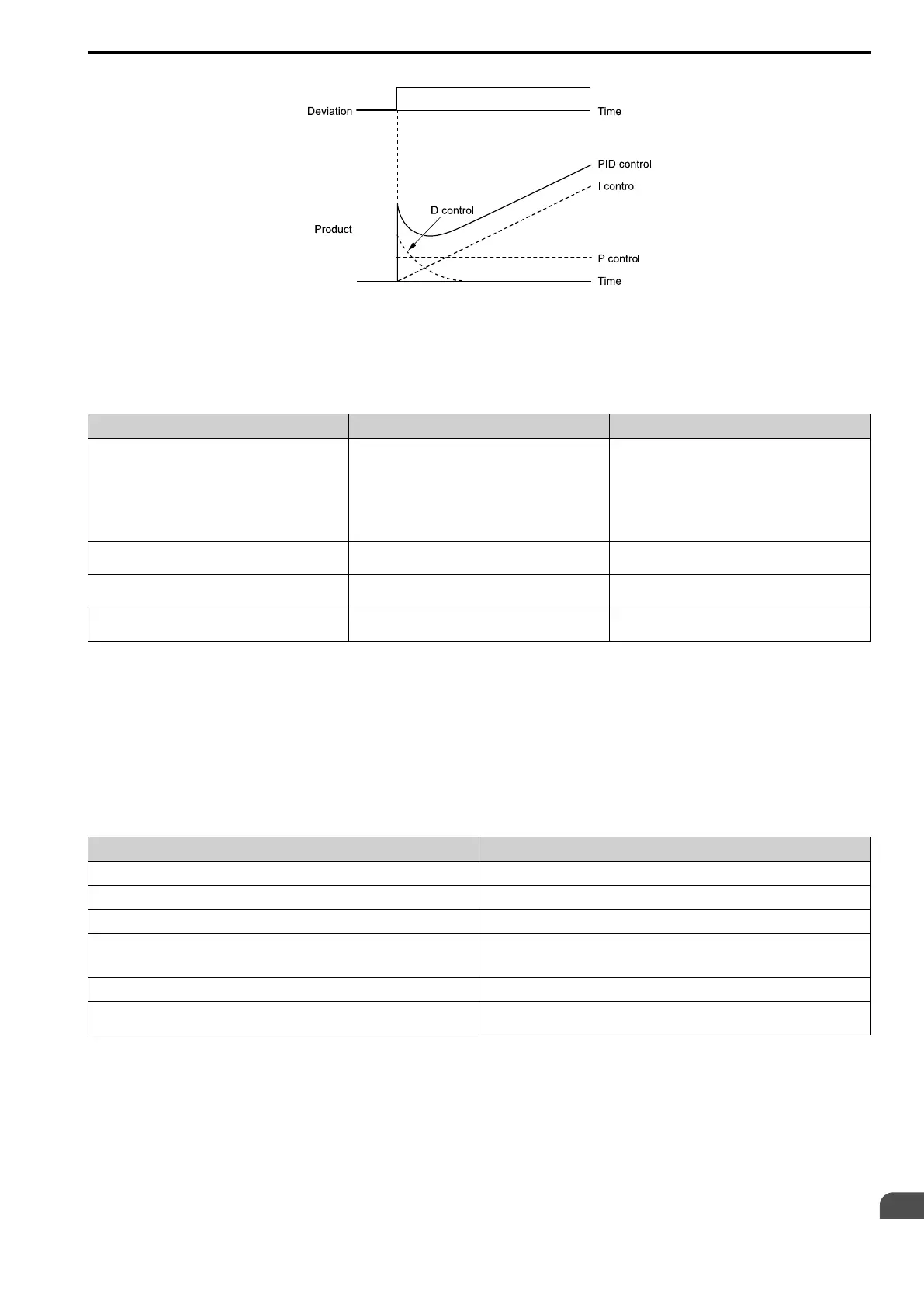
Figure 12.35 PID Control Operation
■ PID Control Applications
Table 12.28 shows applications for PID control.
Table 12.28 PID Control Applications
Application Control Content Sensors Used
Speed Control
• The drive uses a feedback signal for the machine
speed, and adjusts that speed to align with the target
value.
• The drive uses speed data from other machinery as the
target value to do synchronous control. The drive then
adds that target value to the feedback from the
machine it is operating to align its speed with the other
machinery.
Tacho generator
Pressure control
The drive uses feedback from the actual pressure to hold
constant pressure.
Pressure sensor
Flow control
The drive uses feedback from the actual flow to hold
constant flow.
Flow rate sensor
Temperature control
The drive uses feedback from the actual temperature to
control a fan and hold constant temperature.
Thermocoupler, thermistor
■ Input Methods for the PID Setpoint
Use b5-01 [PID Mode Setting] to select how the PID setpoint is input to the drive.
When b5-01 = 1 or 2 [Standard or Standard (D on feedback)], either the frequency reference set in b1-01
[Frequency Reference Selection 1] or b1-15 [Frequency Reference Selection 2] will be the PID setpoint, or the
one of the inputs in Table 12.29 will be the PID setpoint.
When b5-01 = 3 or 4 [Fref + PID Trim or Fref + PID Trim (D on feedback)], one of the inputs in Table 12.29
will be the PID setpoint.
Table 12.29 Input Methods for the PID Setpoint
Input Methods for the PID Setpoint Setting Value
MFAI terminal A1 Set H3-02 = C [Terminal A1 Function Selection = PID Setpoint].
MFAI terminal A2 Set H3-10 [Terminal A2 Function Selection] = C .
MFAI terminal A3 Set H3-06 [Terminal A3 Function Selection] = C.
MEMOBUS/Modbus register 0006H Sets MEMOBUS/Modbus register 000FH (Control Selection Setting) bit 1 to 1 (PID
setpoint input). Enters the PID setpoint to MEMOBUS/Modbus register 0006H (PID
Target, 0.01% units, signed).
Pulse train input terminal RP Set H6-01 = 2 [Terminal RP Pulse Train Function = PID Setpoint Value].
b5-19 [PID Setpoint Value] Set b5-18 = 1 [b5-19 PID Setpoint Selection = Enabled]. Enters the PID setpoint to b5-
19.
Note:
If you set two inputs for the PID setpoint, it will trigger operation error oPE07 [Analog Input Selection Error].
■ Entering the PID Feedback Value
You can use two methods to input the PID feedback value to the drive.
• Use Single Feedback Signal
Use Table 12.30 to select how the feedback signal is input to the drive for PID control.

 Loading...
Loading...









