Commissioning
5-17
L
EDSVS9332P-C EN 3.0
K35.0128
t
V T A C C
v
V T A C C
V T V E L
V T A C C
E n d p o s i t i o n
a 1
a 2
a 3
v 1
v 2
S t a r t i n g
p o s i t i o n
V T A C C
V T V E L
V T A C C
a 4
a 5
a 1
t
w a r t e
v 3
V T P O S 0 3
V T P 0 S 0 1
V T P O S 0 2
V T P O S 0 3
t
6
t
9
V T V E L
t
8
t
7
t
4
t
3
t
1
t
5
t
2
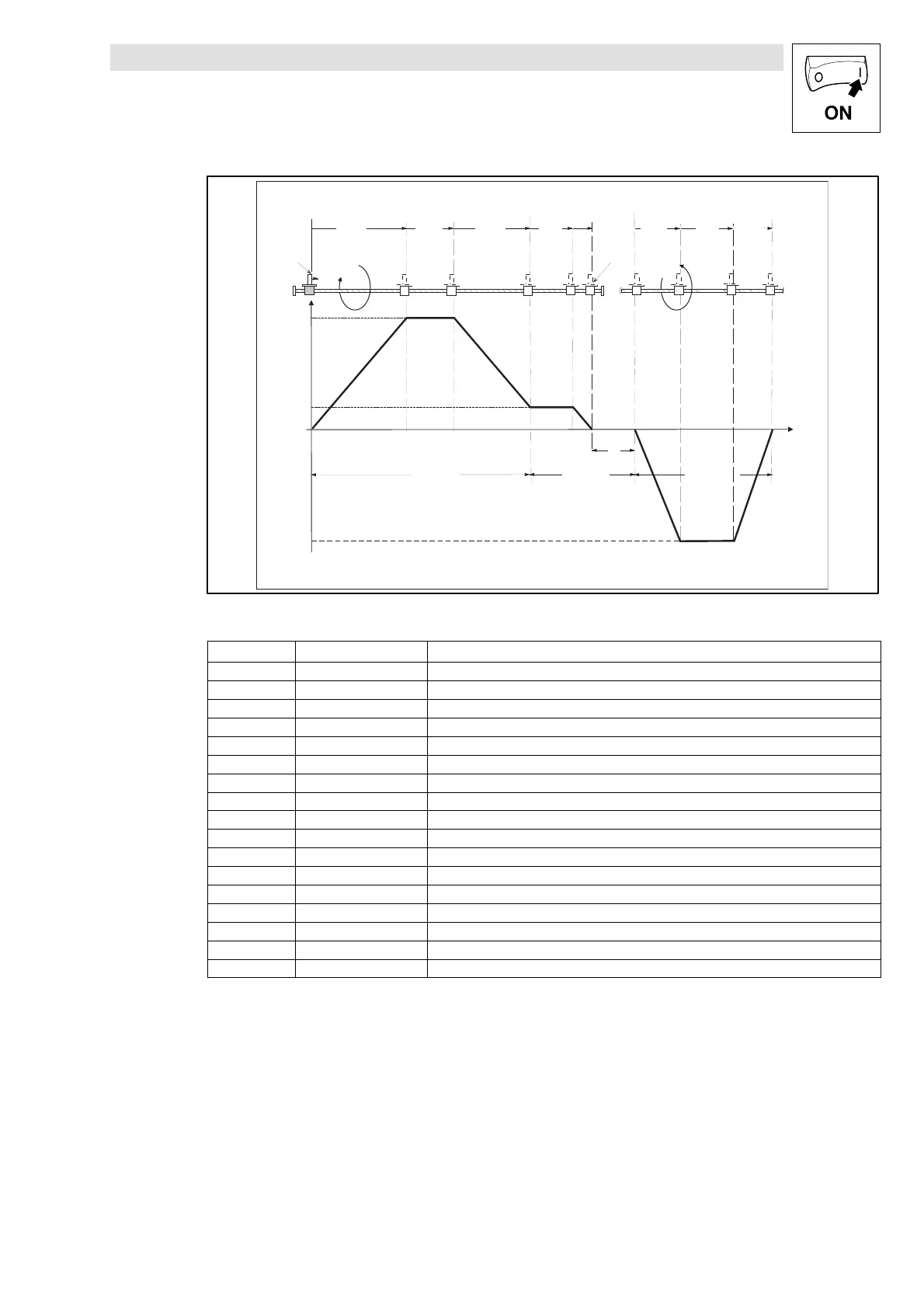
Fig. 5-12 Structure of a travel profile (example of a point-to-point positioning)
Name
Program set (PS) Function
a1 PS01 Acceleration - forwards
t1 PS01 Time until v1 is reached
v1 PS01 Traversing speed - forwards
t2 PS01 Calculated time of braking to reach v2 in t3
a2 PS01 Deceleration 1 - forwards
t3 PS01 Start creeping with v2
v2 PS01, PS02 Final speed (PS01), positioning speed (PS02)
t4 PS02 Drive approaches position
a3 PS02 Deceleration 2 - forwards
t5 PS02 Position reached, then waiting time (e.g. processing of a workpiece)
t6 PS03 Start backward motion
a4 PS03 Acceleration - backwards
t7 PS03 Time until v3 is reached
v3 PS03 Traversing speed - backwards
t8 PS03 Time until a5 starts (calculated)
a5 PS03 Deceleration - backwards
t9 PS03 Time until the start is reached again

 Loading...
Loading...






