Index
P 348
rated
speed;
P 340
I
mag
rms
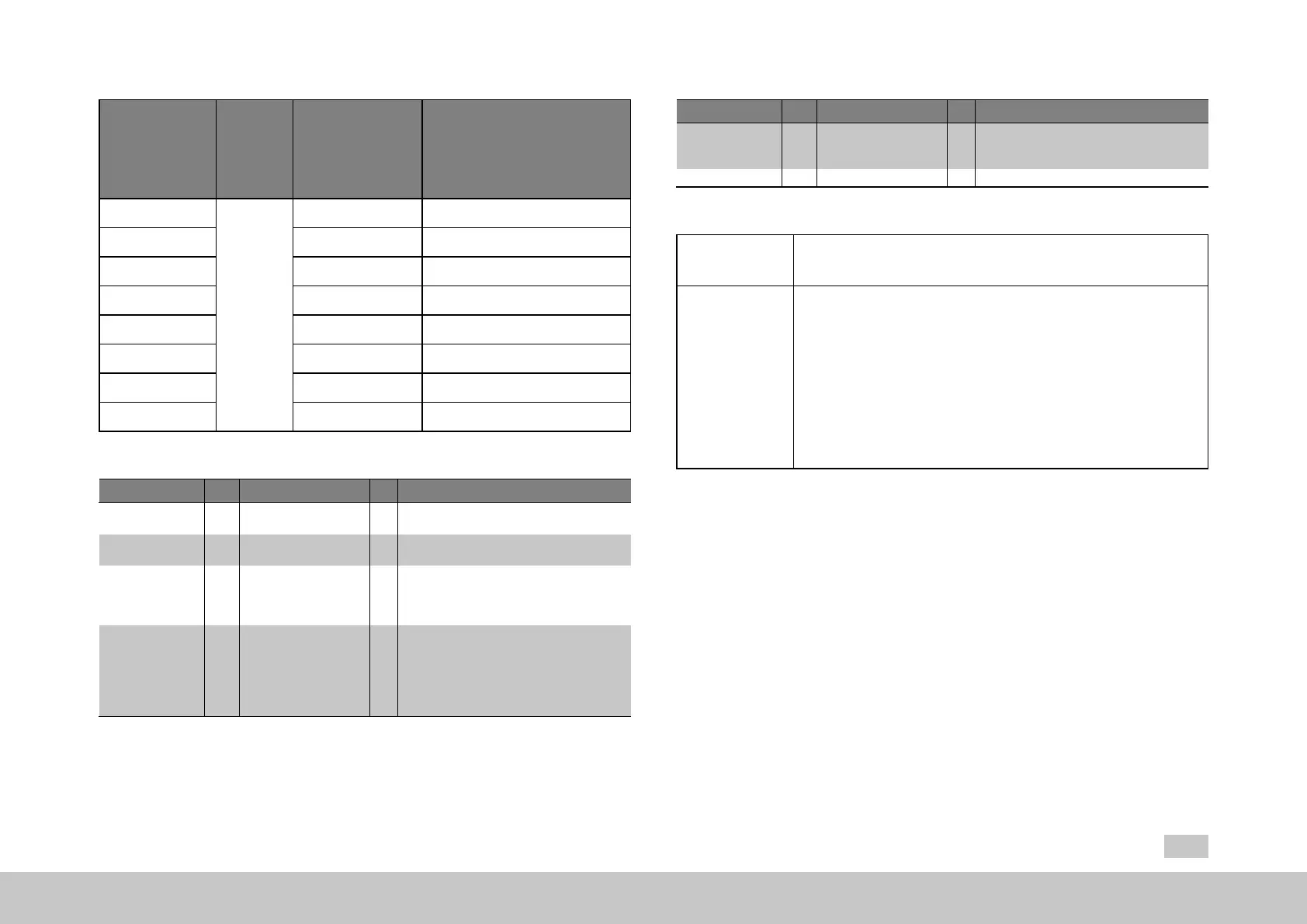
P 342 (0-7) Field
weakening speed
[%]
P 343 (0-7) Magnetizing cur-
rent in field weakening mode
in [%]
(0)
I
rated
=
1800 rpm
I
mag rms
=
100 %
100 0
(1) 110 55
(2) 120 70
(3) 130 90
(4) 140 100
(5) 150 100
(6) 160 100
(7) 170 100
Table 7.25: Example of speeds in P 342 - CON_FM_SpeedTab
ID Index Name / Setting Unit Function
435 0 CON_FM_FWMode Selectionmodeforfieldweakeningof
synchronousmotors
NONE(0)=Field
weakeningdisabled
Fieldweakeningisoff,regardlessofother
settings.
TABLE(1)=IsdsetbyPI
controllerandtable
parameter
Fieldweakeningiseffectedbyacharacteristic
whichspecifiesthed-current(P 343[0] - CON_
FM_ImagTab)dependentonthespeed(P 342
[0] - CON_FM_SpeedTab).
CALC(2)=IsdsetbyPI
controllerandtable
parameter
Fieldweakeningiseffectedbywayofa
characteristicwhichissetinternallyviathe
motorparameters.Thed-currentreferenceis
thencalculateddependentonthespeedAND
therequiredq-current:isd=f(n,isq_ref).
Theinaccuracieswithregardtothemotor
Table 7.26: Parameters for selecting field weakening
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
143
7 Control
ID Index Name / Setting Unit Function
parameters,theavailablevoltageetc.canbe
compensatedforwithP 436[0] - CON_FW_
SpeedScale.
REL(3) Isdforreluctancemodelforsynchronousmotor
Table 7.26: Parameters for selecting field weakening (continue)
CAUTION! Your system/motor may be damaged if put into operation in
an uncontrolled or inappropriate manner.
Failure to exercise caution or follow proper working
procedures may result in damage to your system/motor.
Whenconfiguringprojects,itmustbeensuredthatthe
speedNEVERexceedsthevalueoftheproductof
P 458[0] - MOT_SNom*P 0328_CON_SCON_SMax
Itshouldbeensuredasamatterofprinciplethatthe
inducedvoltagedoesnotexceedthevoltagelimits.
Themaximumsystemspeedmustnotbeexceeded.
7.7.3Synchronousmotorvoltagecontrollerfield
weakening
The voltage controller is superimposed onto the selected characteristic curve. When
the voltage controller is used, a part of the available voltage is used as a control
reserve. The more dynamic the running, the more control reserve is required. In this
case it may be that the voltage for rated operation is not sufficient, and also that the
controller starts to oscillate.
If the voltage controller oscillates, the gain must be reduced. If substantial variations
between the q-current reference and actual values occur during run-up to reference
speed in the field weakening range, the servo drive may be at the voltage limit. In

 Loading...
Loading...