8.11.6Engagement
P253[0] - MPRO_ECAM_Egear_GearInMode is used to define the mode for
engagement.
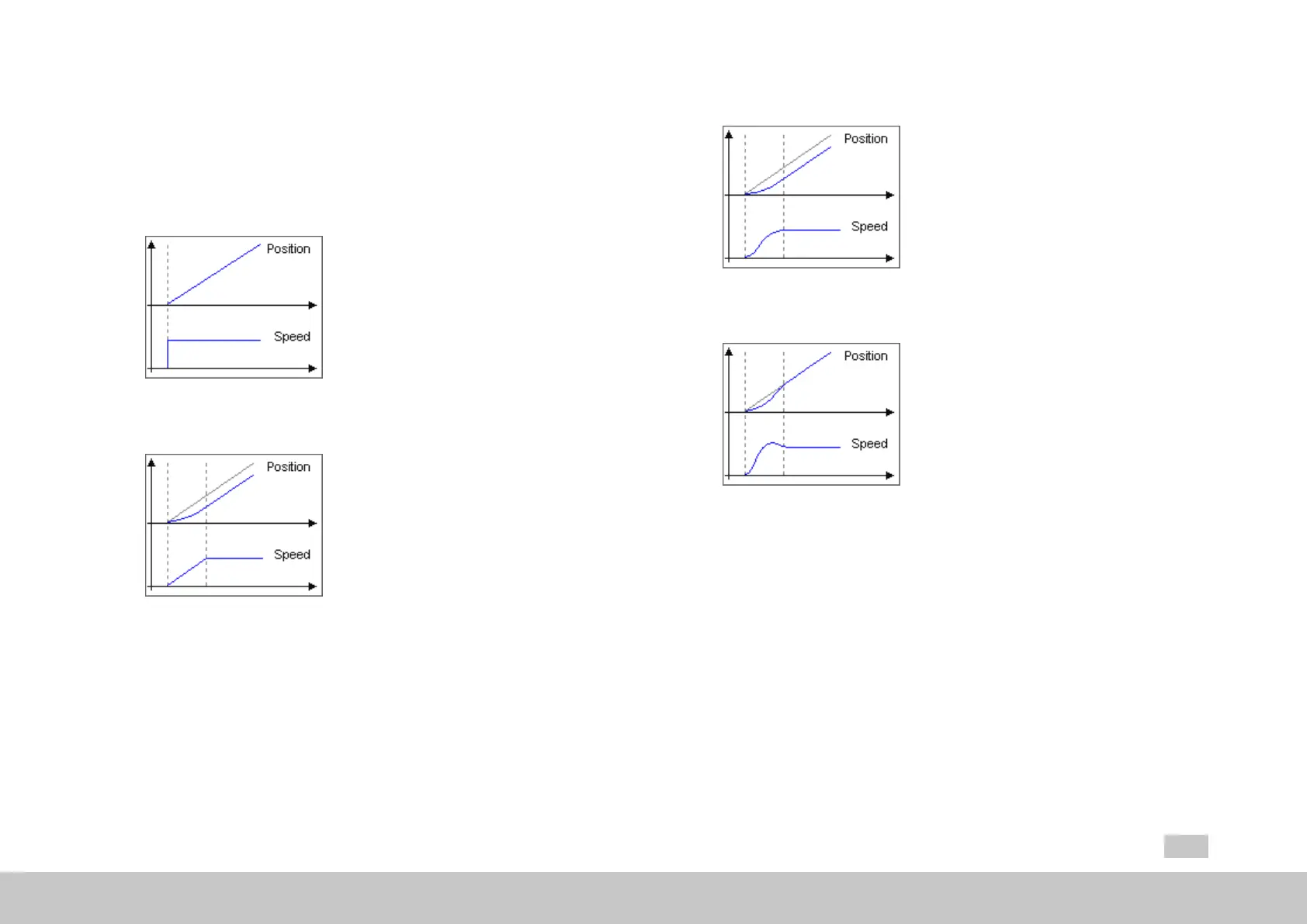
DIRECT (0) = Direct
Directengagement:Angularsynchronous;withjerking(noramps).
RAMP (1) = Linear speed ramp
Engagementwithlinearacceleration:Notangularsynchronous;withjerking.
P 255[0](seebelow)canbeusedtodefinetheacceleration.
FADE (2) = Engagement fade-out
Engagementwithfade-outfunction(5thdegreepolynomial):Notangular
synchronous;jerk-limited.Thepositionisignored.Therealwaysremainsa
variationbetweenreferenceandactualposition.P 257[0](seebelow)is
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
226
8 Motion profile
usedtodefinetheengagementdistance(betweenthedashedlines).
CROSSFADE (3) = Crossfading
Engagementwithcrossfadingfunction(5thdegreepolynomial):Angular
synchronous;jerk-limited;speedwillovershootduringengagement.
P255[0] - MPRO_ECAM_Egear_GearInAcc is used to define the acceleration for
the "RAMP (1)” mode.
P257[0] - MPRO_ECAM_Egear_GearInDist is used to define the engagement
distance. The actual engagement occurs within this range (between the dashed
lines).

 Loading...
Loading...