8.5.2Method(-13):Absoluteencoder
Method (-13) works in a similar way to method (-5) (see Section "Method (-5):
Absolute encoder" on page 194). However, in this method the home offset is used
to define the machine zero point, while in method (-5) it is used to define the
offset relative to the encoder’s absolute position.
The following is the difference between the machine zero points for each method:
Method(-13):Actualvalue=Homeoffset
Method(-5):Actualvalue=Absoluteencoderposition(firstneedstobe
determinedwithhomeoffset=0)+newhomeoffset
Method (-13) is significantly easier to use, as it eliminates the need to determine the
encoder’s absolute position at the machine zero point and back-calculate the actual
position.
Fig. 8.39: Set the machine homing point
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
191
8 Motion profile
8.5.3Method(-12):Setabsoluteposition(absolute
measuringsystem)
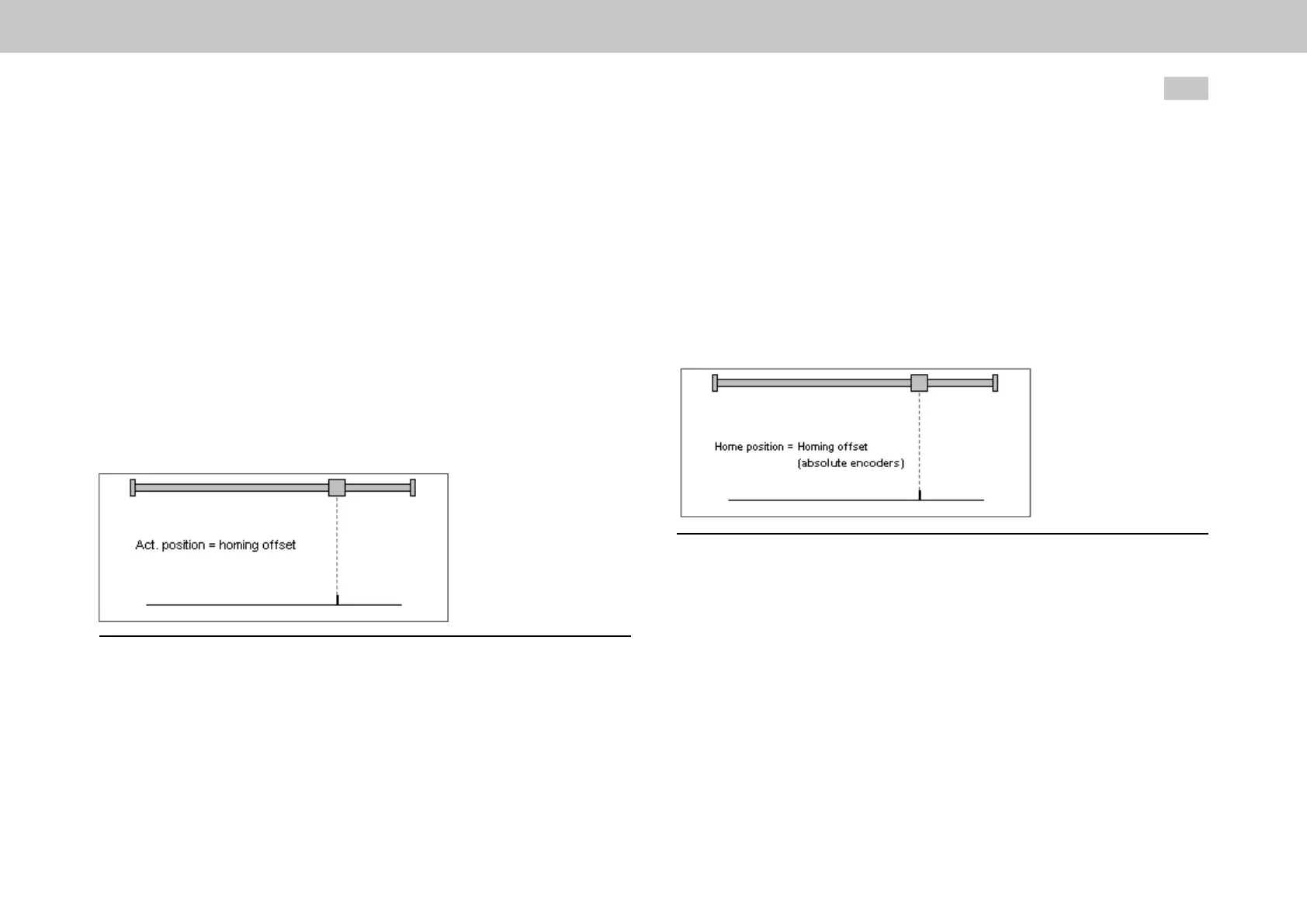
To set the machine homing point, the rotor or the linear axis is moved to the machine
homing point. The desired actual position is written to the "Offset" parameter, P 2234
MPRO_402_Homeoffset. Afterward, the axis must be referenced once. Every time
the axis is started thereafter, the absolute position is calculated automatically. Every
time a new homing operation is initiated, the machine homing point is reset to the
current position.
Fig. 8.40: Set the machine homing point

 Loading...
Loading...