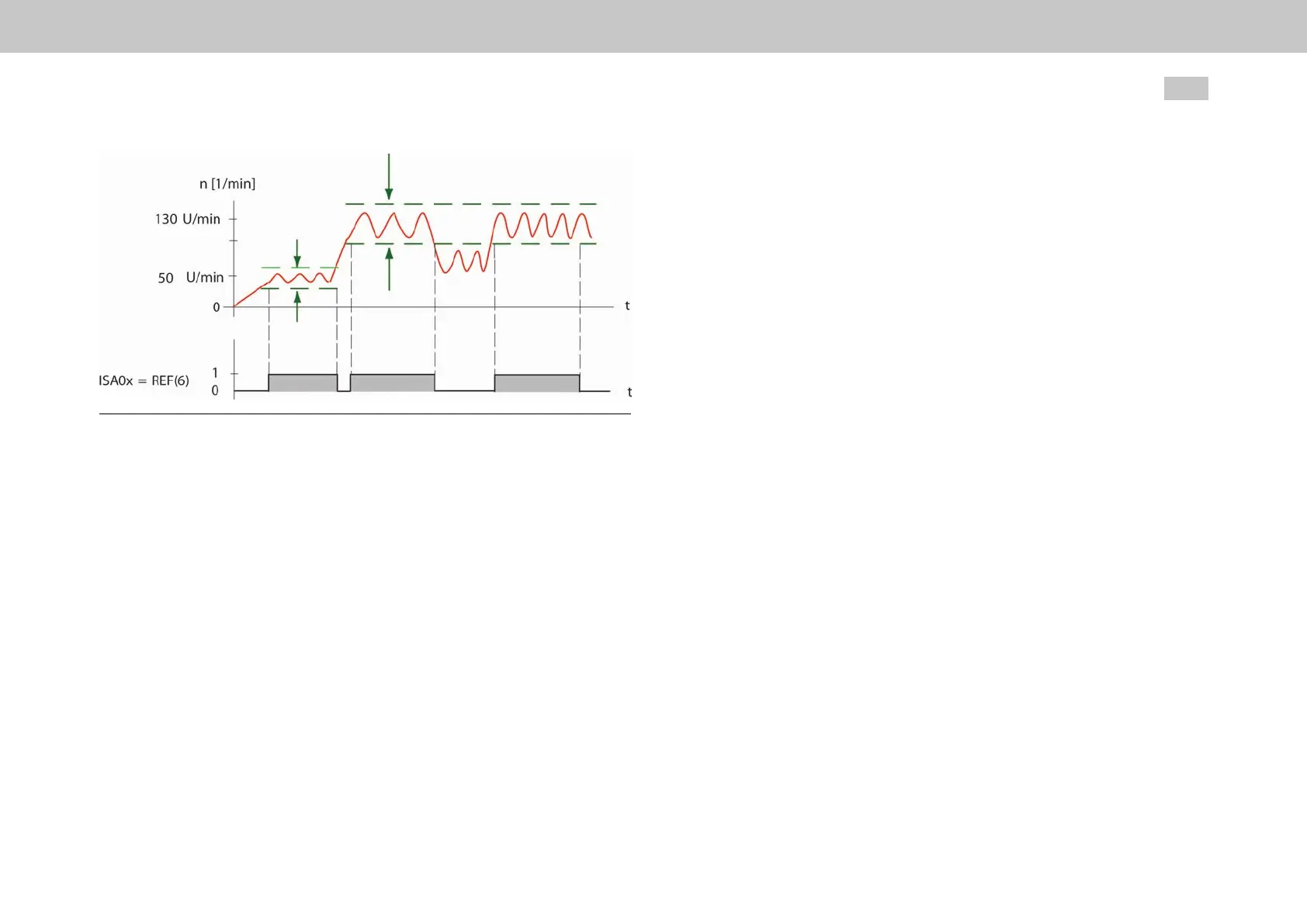
Fig. 9.7: Threshold definition
9.3.6ReferencelimitLIMIT(14)
The "LIMIT(14)" function for a digital output signals when a setpoint has reached its
limit. In this case the output is set. The limit values for maximum torque and
maximum speed depend on the preset control system.
Torque control
The limit monitoring mechanism will signal whenever the torque setpoint
exceeds the maximum torque (see Section "Limits / thresholds" on page 251).
Speed control
The limit monitoring mechanism will signal whenever the speed setpoint
exceeds the maximum speed (see Section "Limits / thresholds" on page 251).
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
242
9 Input/Output settings
Positioning
The limit monitoring mechanism will signal whenever the speed setpoint exceeds
the maximum speed or the torque setpoint exceeds the maximum torque (see
Section "Limits / thresholds" on page 251).
Infinite positioning/speed mode
Monitoring is activated in infinite positioning (speed mode) when the speed
reference has been reached. If an ongoing positioning operation is interrupted with
"HALT", the "Reference reached" message is not sent in this phase. The message
only appears after the actual target position has been reached.
9.3.7Switchingwithmotorcontactor
Switching in the power cable should only be carried out in a de-energized state.
Failure to follow this requirement may result in problems and damage (e.g.
overvoltage or overcurrent shutdowns, pitted contacts). To ensure currentless
switching, the contacts of the motor contactor must be closed before enabling the
power stage. In the opposite case the contacts must remain closed until the power
stage has been switched off. This can be achieved by implementing the
corresponding safety periods for switching of the motor contactor into the control
sequence of the machine or by using the special "ENMO" software function of the
servo drive.
A power contactor in the motor supply line can be directly controlled by the servo
drive via parameter P125[0] - MPRO_OUTPUT_FS_MOTOR_BRAKE = ENMO(21).
The timer P148[0] - MPRO_DRVCOM_ENMO_Time defines the on-and-off delay of
the power contactor. Based on the time delay, the reference value is applied after
the power contactor is active. If the power stage is switched off, the power contactor
isolates the motor from the drive.

 Loading...
Loading...