8.11.5Electronicgearing
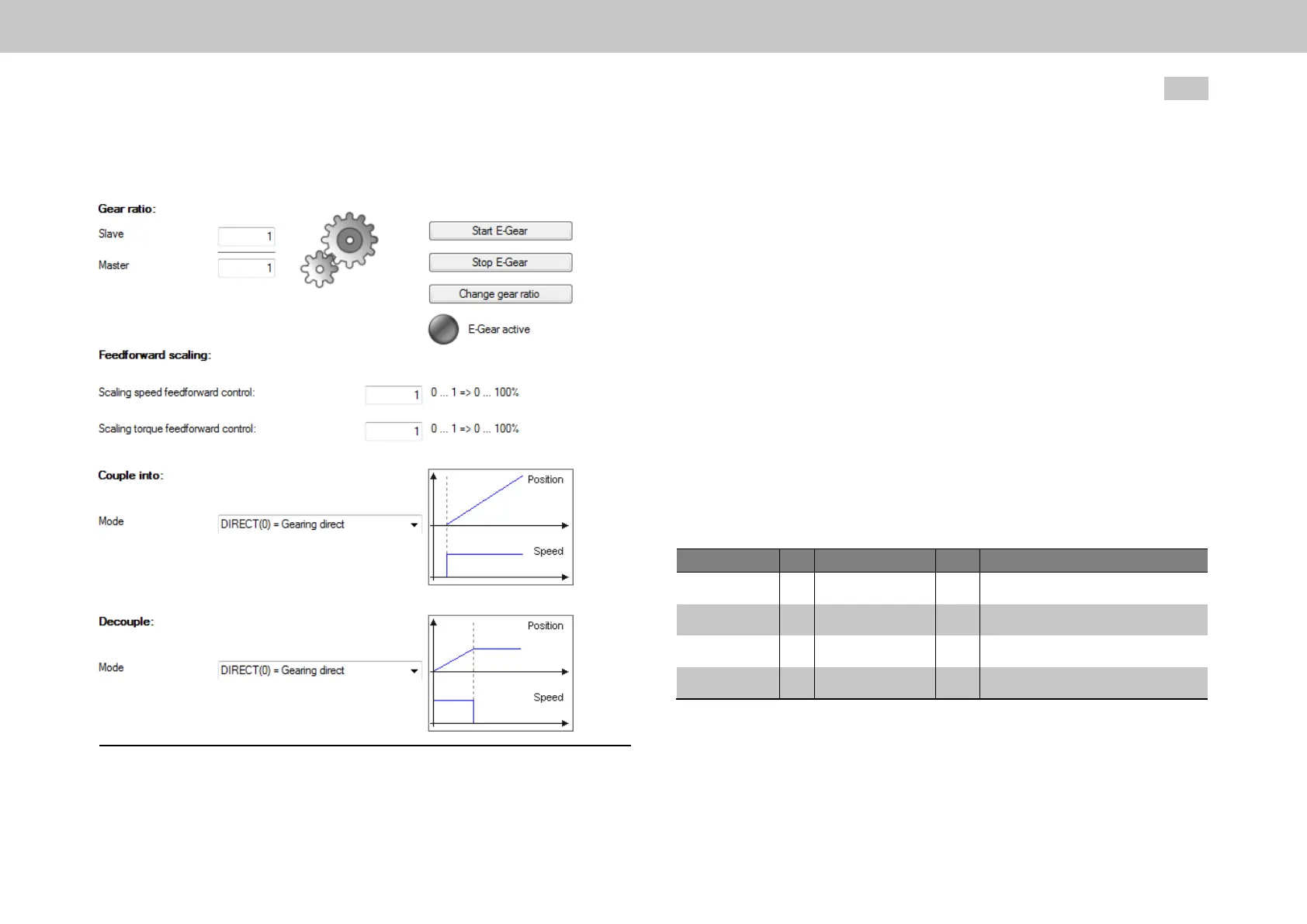
Fig. 8.73: "Electronic gearing" screen
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
225
8 Motion profile
Gear ratio
The gear ratio is specified as a fraction. This ensures that the position references
can be translated to the motor shaft with no rounding error.
"Slave"(P 252[0] - MPRO_ECAM_Egear_GearNum)isthenumerator
"Master"(P 251[0] - MPRO_ECAM_Egear_GearDen)isthedenominator
Scaling of speed pre-control
Defined with P265[0] - MPRO_ECAM_CamSlave_SpeedFactor.
Scaling of torque pre-control
Defined with P266[0] - MPRO_ECAM_CamSlave_TorqueFactor.
Engagement
See Section "Engagement" on page 226.
Disengagement
See Section "Disengagement" on page 227.
ID Index Name Unit Description
251 0 MPRO_ECAM_Egear_
GearDen
EGEAR:Geardenominator
252 0 MPRO_ECAM_Egear_
GearNum
EGEAR:Gearnumerator
1344 0 MPRO_ECAM_Egear_
LimRefAcc
rpm/s EGEAR:Accelerationlimitforreference
1345 0 MPRO_ECAM_Egear_
LimRefJerk
rpm/s^2 EGEAR:Jerklimitforreference
Table 8.38: “Synchronized motion - Electronic gearing” parameters

 Loading...
Loading...