8.5.16Method(35)
The actual position corresponds to the reference point.
Fig. 8.62: The actual position corresponds to the homing point
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
203
8 Motion profile
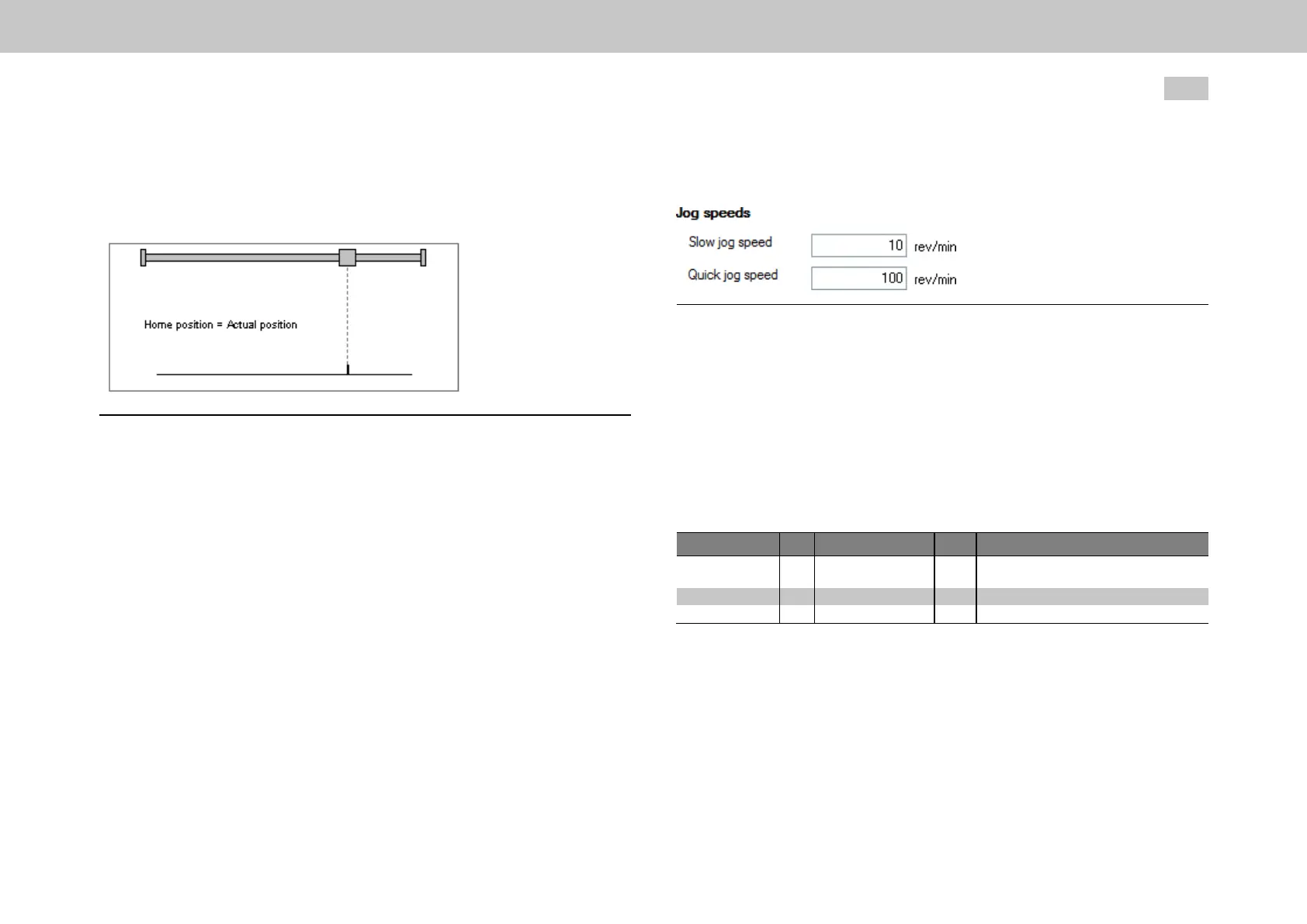
8.6Jogmode
Fig. 8.63: “Jog speeds” dialog box
Jog mode (setup mode) is used to record (teach-in) positions, for disengaging in the
event of a fault, or for maintenance procedures. A bus system or reference sourcing
via terminal can be selected as the reference. The unit corresponds to the selected
user unit.
Two speeds are available for both directions. If the drive is to be moved at different
speeds, both inputs must be active (relevant bits in bus operation). If the "Jog left"
input is activated first and then input two, "Fast jog mode left" is started. If the "Jog
right" input is activated first, "Fast jog mode right" is started.
ID Index Name Unit Description
168 MPRO_REF_
JogSpeeds
Jogmodespeeds
168 0 FastJogSpeed rev/min Fastjogspeed
168 1 SlowJogSpeed rev/min Slowjogspeed
Table 8.22: “Jog mode” parameters
8.6.1Configuration
Joginpositiveandnegativedirection:
Settwodigitalinputs
ISD0x=INCH_P(7)=jog+
ISD0x=INCH_N(8)=jog-

 Loading...
Loading...