The motor shaft motion can be minimized by a shaft angle controller. The structure
and parameters of the speed controller are used for the purpose. The gain can be
scaled via P391[0] - CON_ICOM_KpScale. The precondition is a preset speed
control loop. Increasing the gain results in a reduction of the motion. An excessively
high gain will result in oscillation and noise. In both methods (1) and (4), the flux
forming current "Isdref" is injected as a test signal.
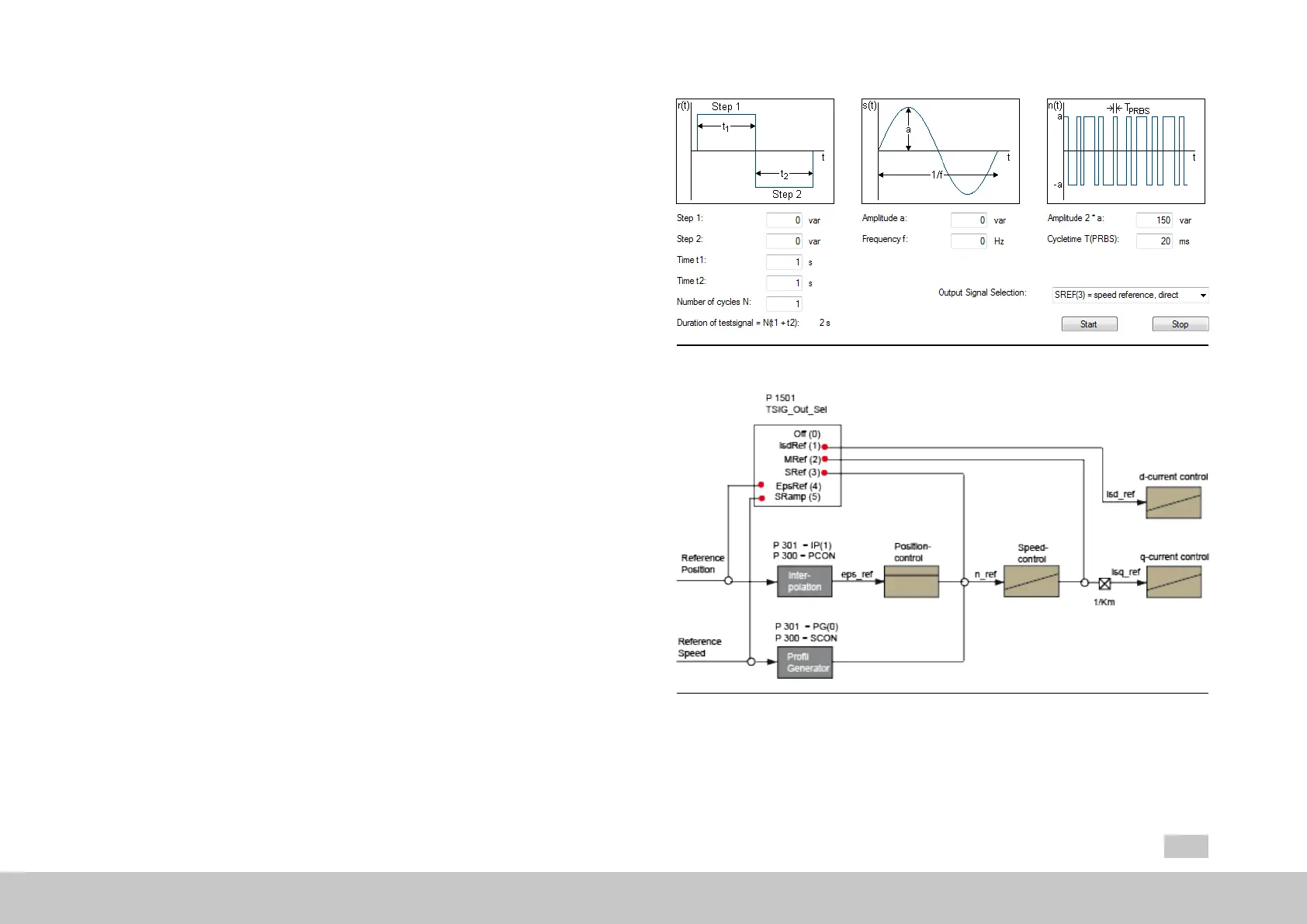
7.8.4Testsignalgenerator
It is possible to form various signal types and transfer them to the control. This
function is independent of the control mode and has a direct effect on the control.
Signal types can also be combined. The delta signal form is additionally available,
though at present it is only accessible via the parameter editor. The parameters are
recorded in the parameter list.
7.8.4.1PRBSsignal
The PRBS signal is suitable for system excitation with high bandwidth using a test
signal. With the aid of a shift register fed back, a binary output sequence with an
amplitude that can be set in parameter P1509 - SCD_TSIG_ RBSAmp and a
"random" alternating frequency is generated.
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
149
7 Control
Fig. 7.37: “Test signal generator” screen
Fig. 7.38: TSIG output: Signal curve of TG

 Loading...
Loading...