Thepositionreferencesareusedtogeneratepre-controlvaluesforspeed
andacceleration.Thesearescannedusingthepositioncontroller’scycle
time(normally125µs)andfedintothecontrolloops.
8.3.2.1Motionprofile/Basicsettings
In this dialog box the basic settings for the motion profile are made according to the
list boxes. If Profile Generator and IP mode are enabled, the reference value is
influenced by both functions.
Reference
Source
P 0165
-OFF (0)
-ANA0 (1)
-ANA0 (2)
-Tab (3)
-leer (4)
-PLC (5)
-PARA (6)
-CiA DS402 (7)
-SERCOS (8)
-PROFIBUS (9)
-Varan (10)
Normierung
-DS402
-SERCOS
-Benutzerdefiniert
IP-Method
NoIP (0) = Aus
linear IP
SplineExtFF(2) = IP with external feedforward
SplineII(3) = Kubische Spline IP
NonIPSpline(4) = Kubische Spline approximation
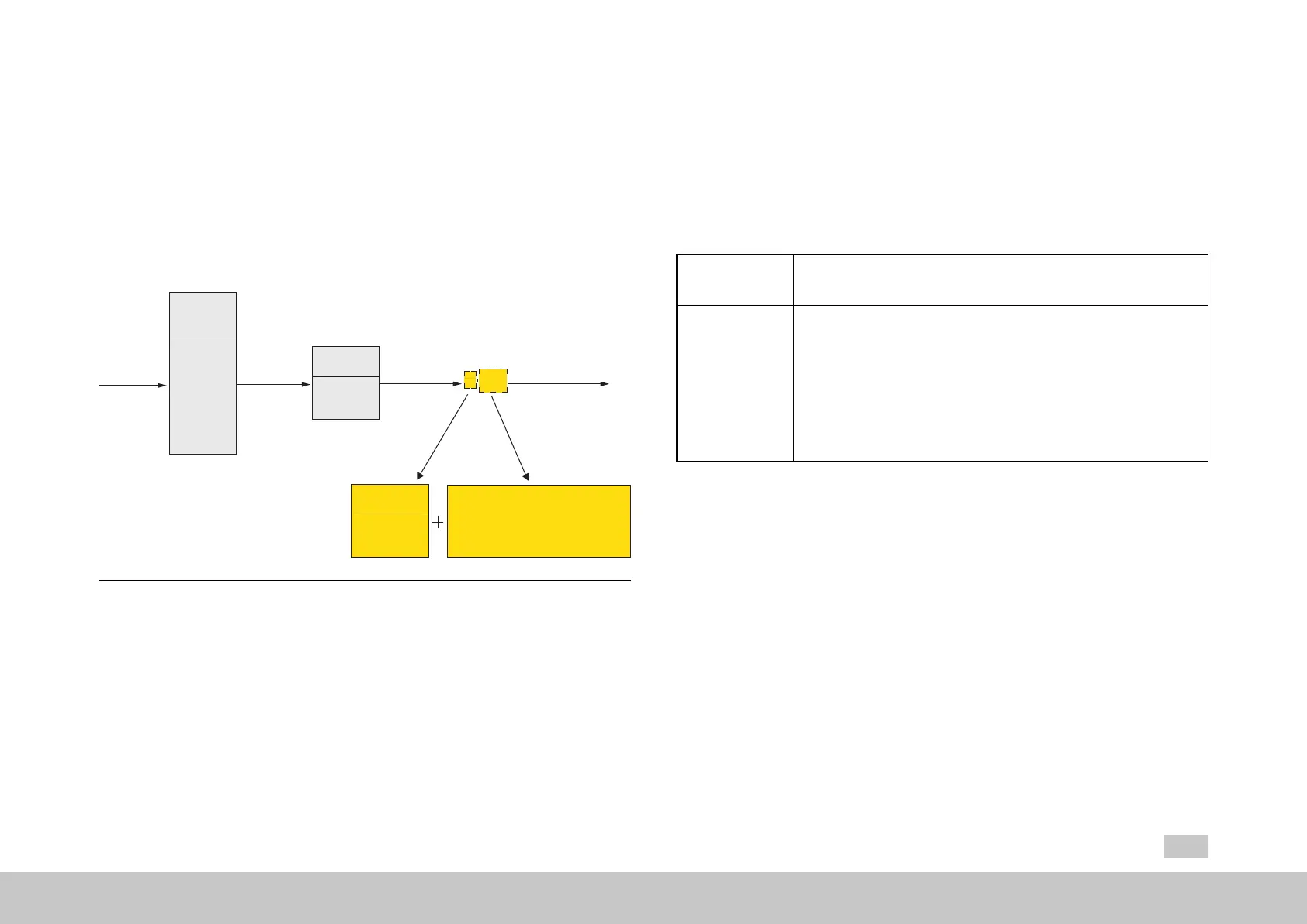
Referencevalue
Profilegenerator
PG-Mode
- Ramps
- Smoothing
- Filter
Referencevalue
Userunit
Referencevalue
Increments
Samplingtime
1 ms
Samplingtime
≥ 125 µs
Position control
Fig. 8.27: PG mode with position control
8.3.3IPmodewithspeedcontrol
In IP (Interpolation) mode the appropriate reference source and correct scaling of
units are selected for the speed reference before the reference is passed via the
interpolator to the control. Linear interpolation is always applied in this process.
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
182
8 Motion profile
Interpolation (IP) mode
Referencevaluesareinterpolatedinlinearmodebeforebeingswitchedto
thecontrolloops.
Theprofilegeneratorisinactive.
Rampsandsmoothingareinactive.
Thereferencevaluesareswitcheddirectlytotheclosed-loopcontrol.
CAUTION! Your system/motor may be damaged if put into operation in
an uncontrolled or inadequate manner.
Improper conduct can cause damage to your system
machine
Beforethe“Start”step,makeabsolutelysurethatavalid
setpointhasbeenentered,astheconfiguredsetpoint
willbeimmediatelytransmittedtothemotorafterthe
motorcontrolfunctionstarts,whichmayresultinthe
motoracceleratingunexpectedly.
Speed control in IP mode:
ControlmodeP 300[0] - CON_CfgCon=speedcontrolorsettingviaModes
ofOperation(CAN,EtherCAT®)
SelectionofreferencesourceP 165[0] - MPRO_REF_SEL
Scaling
Linearinterpolationisalwaysappliedinspeedcontrol.
Bussamplingrate:Thebussamplingtimeiscustom-setaccordingtothe
application.

 Loading...
Loading...