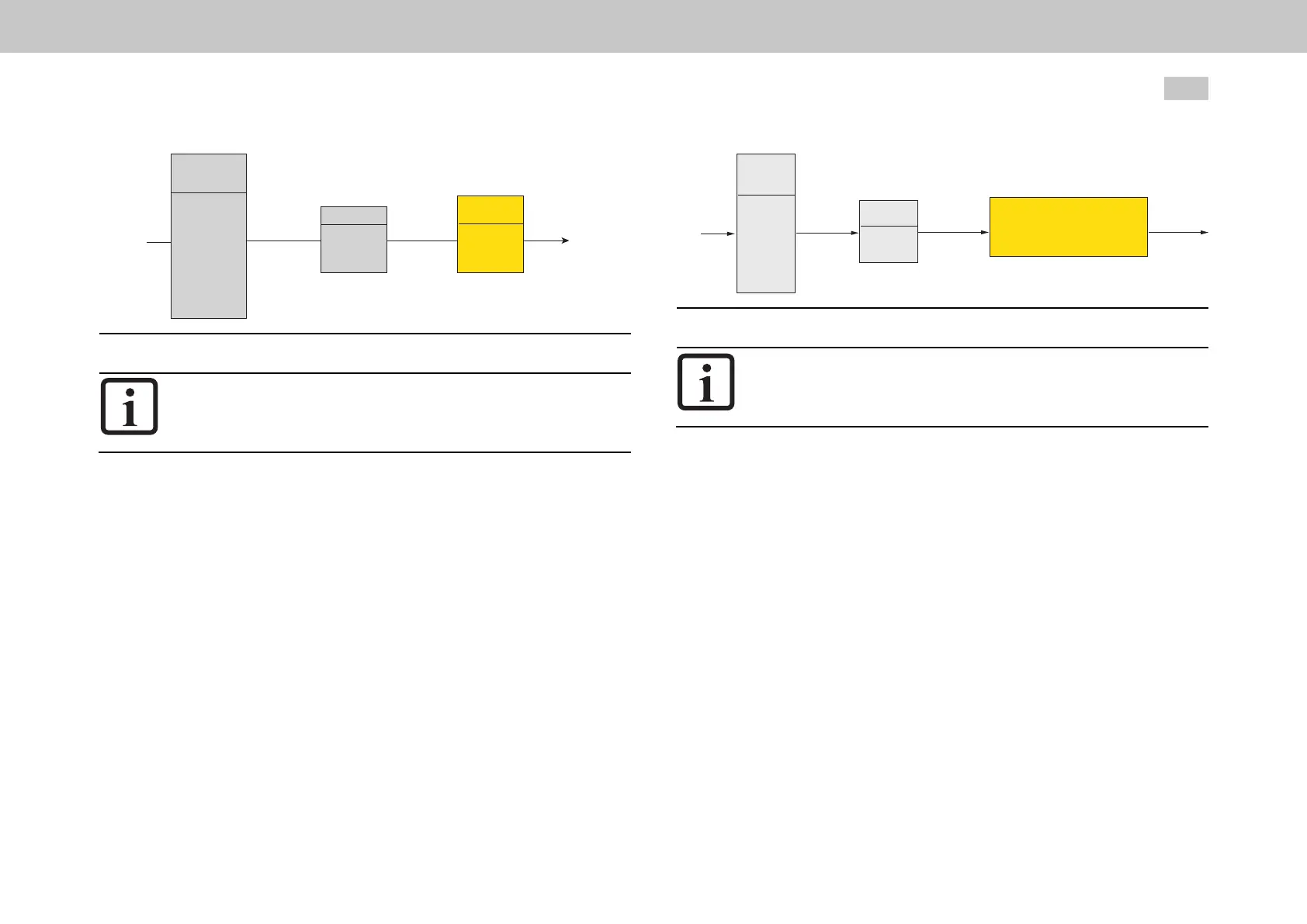
Referencevalue
P 0165
-OFF (0)
-ANA0 (1)
-ANA0 (2)
-Tab (3)
-leer (4)
-iPLC (5)
-PARA (6)
-CiA DS402 (7)
-SERCOS (8)
-PROFIBUS (9)
-VARAN (10)
Normalization
-DS402
-SERCOS
-User-specific
Interpolation
IP-Mode
Lineare
Interpolation
Referencevalue
Speed control
Referencevalue
Userunit
Referencevalue
Increments
Samplingtime
1 ms
Samplingtime
≥
125 µs
Fig. 8.28: Speed control in IP mode (Motion Profile subject area)
NOTE
Linearinterpolationisalwaysappliedinspeed-controlledmode.
Pre-controlisnotactive.
8.3.4IPmodewithpositioncontrol
Positionreferencevaluesarepresetbyahigher-levelPLCwithan
appropriatesamplingtime.
ThesamplingtimemustbebalancedbetweenthePLCanddrive
P0306CON_IpRefTS.
Thepositionreferencesarethentransferredtothefineinterpolator.
Pre-controlvaluesforspeedandaccelerationareswitchedtothecontrol
loops.
Formoreinformationonthecycletimeseethefieldbusdocumentation.
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
183
8 Motion profile
Reference
Source
P 0165
-OFF (0)
-ANA0 (1)
-ANA0 (2)
-Tab (3)
-leer (4)
-PLC (5)
-PARA (6)
-CiA DS402 (7)
-SERCOS (8)
-PROFIBUS (9)
-Varan (10)
Normilazation
-DS402
-SERCOS
-User defined
IP-Method
NoIP (0) = Off
linear IP
SplineExtFF(2) = IP with external feedforward
SplineII(3) = Kubic Spline IP
NonIPSpline(4) = Kubic Spline approximation
Referencevalue
Referencevalue
Userunit
Referencevalue
Increments
Samplingtime
1 ms
Samplingtime
≥
125 µs
Positioncontroll
Fig. 8.29: Position control in IP mode (Motion Profile subject area)
NOTE
Inlinearinterpolationthepre-controlisignored.
8.3.5Jerklimitationandspeedoffset
8.3.5.1Jerklimitation(Profilemode)
The transfer path from the motor to the mechanism may be elastic and so
susceptible to oscillation. For that reason, it is advisable to also limit the maximum
rate of change of the torque and thus the jerk. Due to the jerk limitation the
acceleration and deceleration times rise by the smoothing P 166[0] - MPRO_REF_
JTIME
.
The smoothing setting box appears on-screen as soon as the profile type
P 2243[0] - MPRO_402_MotionProf type is set to JerkLin(3).
8.3.5.2Speedoffset(limitation)
With speed override P 167[0] - MPRO_REF_OVR the maximum preset speed
reference is scaled in percent.

 Loading...
Loading...