8.5Homing
Homing serves to establish an absolute position reference (referred to the entire
axis), and must usually be performed once after power-up. Homing is necessary
when absolute positioning operations are carried out without absolute encoders
(e.g. SSI multi-turn encoders). For all other positioning operations (relative, infinite)
no homing is required. For zero position adjustment of absolute encoders homing
method -5 is available. There are various methods, which can be set according to
the application.
The selection of a homing method defines:
Thereferencesignal(positivelimitswitch,negativelimitswitch,reference
cam)
Thedirectionofthedrive
Thepositionofthezeropulse
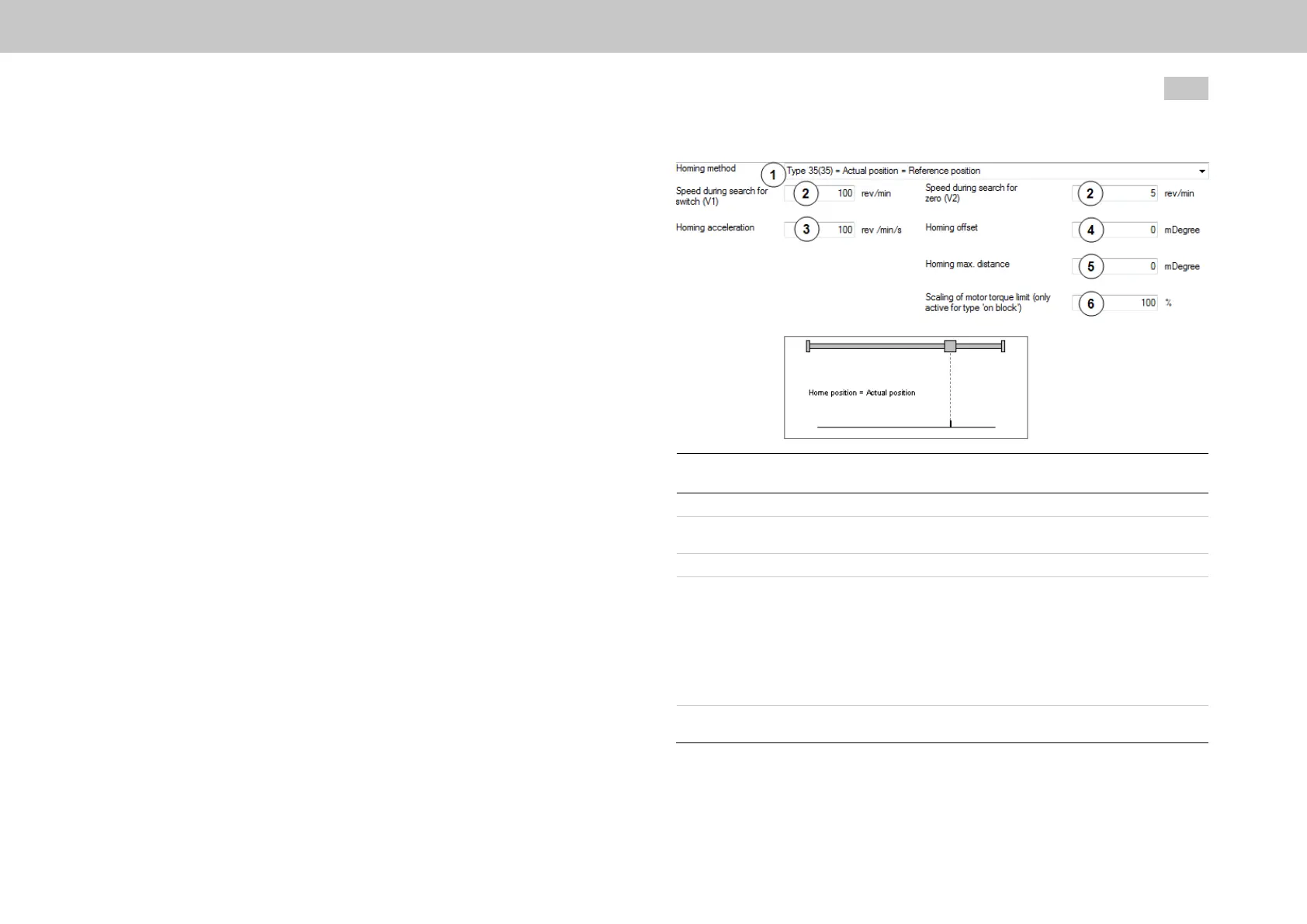
8.5.1Homingdialogbox
The homing movement is dictated by the speed (velocity) V1 and V2, the
acceleration and the maximum positioning range.
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
189
8 Motion profile
Fig. 8.38: Selection method selection
①
Selectionofhomingmethods(-12)to(35)
②
SpeedV1:Speedduringcamsearch
SpeedV2:Speedduringzeropointsearch
③
AccelerationforV1andV2
④
Thereferencepointusuallyhasanactualpositionvaluedefinedontheaxisside
referred to the axis zero.
Ideally,thepositionvalueofthedrive-sidedatumpointandofthereferencepoint
wouldbeidentical.As the position of the datum point is decisively influenced by
the encoder mounting, however, the datum and reference points differ.
To establish a positional reference to the real axis zero, the desired axis-related
actual position value of the reference point should be set via the zero offset.
⑤
Limitationofpositioningrangeforhoming.Onexitingthepositioningrange,the
axisisstoppedwiththeerrormessage"Overrun".
Legend to “‘Homing method’ screen” figure

 Loading...
Loading...