ID Index Name Unit Description
462 0 MOT_FluxNom Vs Motorratedfluxlinkage
470 0 MOT_Rstat Ohm Motorstatorresistance
471 0 MOT_Lsig mH Motorleakageinductance(ASM)/stator
inductance(PSM)
472 MOT_LsigDiff q-axisstatorinductancevariation(relativeto
MOT_Lsig)
472 0 Lsig_q@I0 % Inductance@CurrentI0
472 1 Lsig_q@I1 % Inductance@CurrentI1
472 2 Lsig_q@I2 % Inductance@CurrentI2
472 3 Lsig_q@I3 % Inductance@CurrentI3
472 4 CurrentI0 % CurrentI0relativetoMOT_CNom
472 5 CurrentI1 % CurrentI1relativetoMOT_CNom
472 6 CurrentI2 % CurrentI2relativetoMOT_CNom
472 7 CurrentI3 % CurrentI3relativetoMOT_CNom
479 MOT_TorqueSat Inductorsaturation:Characteristic(torque/Q
current)
479 0 Torque@I0 Nm Torque@currentI0
479 1 Torque@I1 Nm Torque@currentI1
479 2 Torque@I2 Nm Torque@currentI2
479 3 Torque@I3 Nm Torque@currentI3
479 4 Torque@IMax Nm Torque@currentI4
479 5 CurrentI0 A CurrentI0
479 6 CurrentI1 A CurrentI1
479 7 CurrentI2 A CurrentI2
479 8 CurrentI3 A CurrentI3
479 9 CurrentIMax A CurrentI4
Table 5.4: “Linear synchronous motor electronic data” parameters
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
37
5 Motor
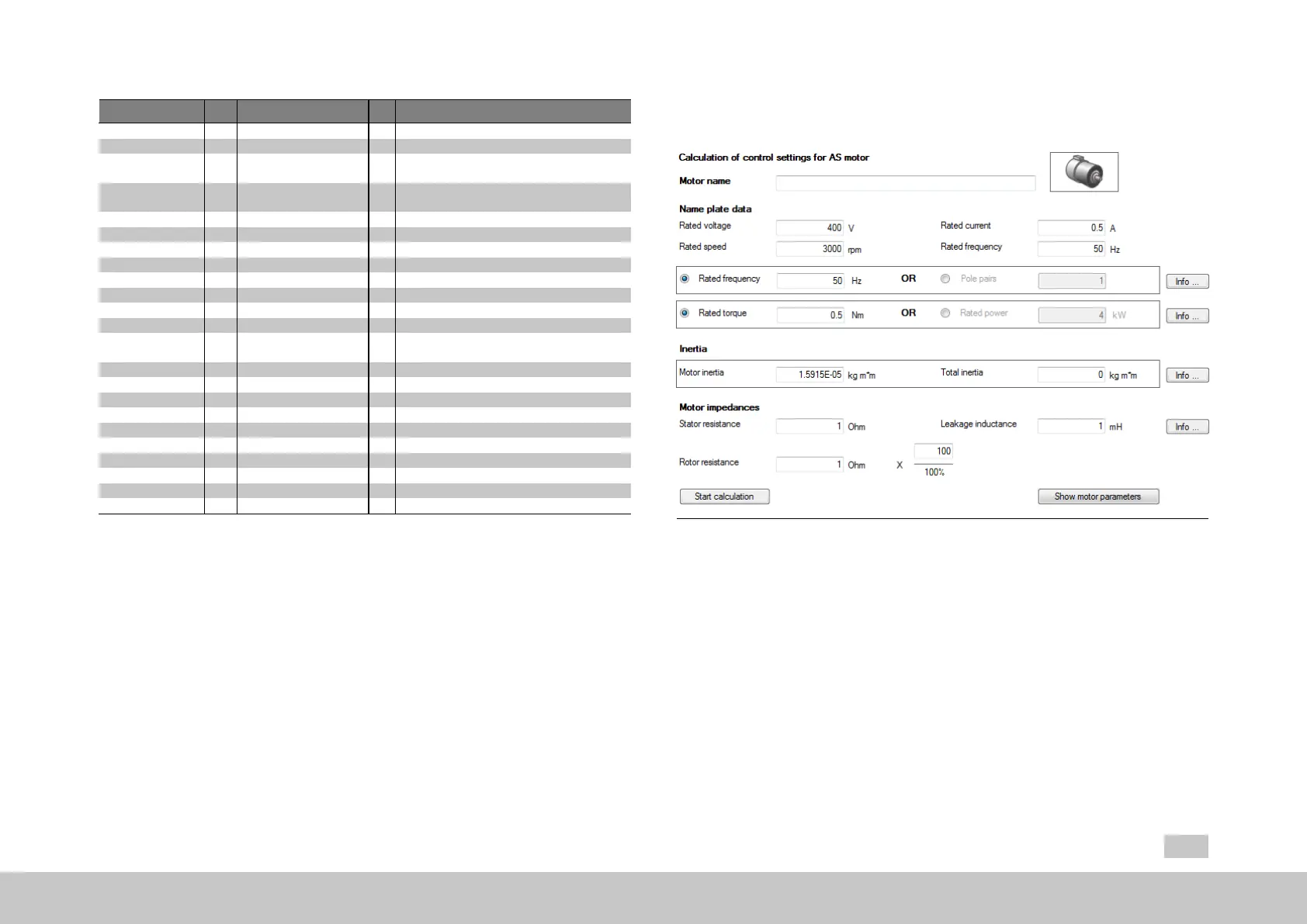
5.4Asynchronousmotor
Fig. 5.6: “Asynchronous motor configuration” screen
There are two methods of creating a motor data set for the asynchronous motor.
Variant1:Motorcalculation
Variant2:Motoridentification(Fordetails,see Section"Motor identification"on
page43)

 Loading...
Loading...