7.3Torquecontroller
The torque controller is executed as a PI controller. The gain (P-component) and the
integral-action time (I-component) of the individual controllers are programmable. In
order to optimize the current control loop, two rectangular reference steps are preset.
The object of the optimization is a current controller with moderate dynamism and
the following values:
Currentcontroltime:<1ms
Overshoot:<5%
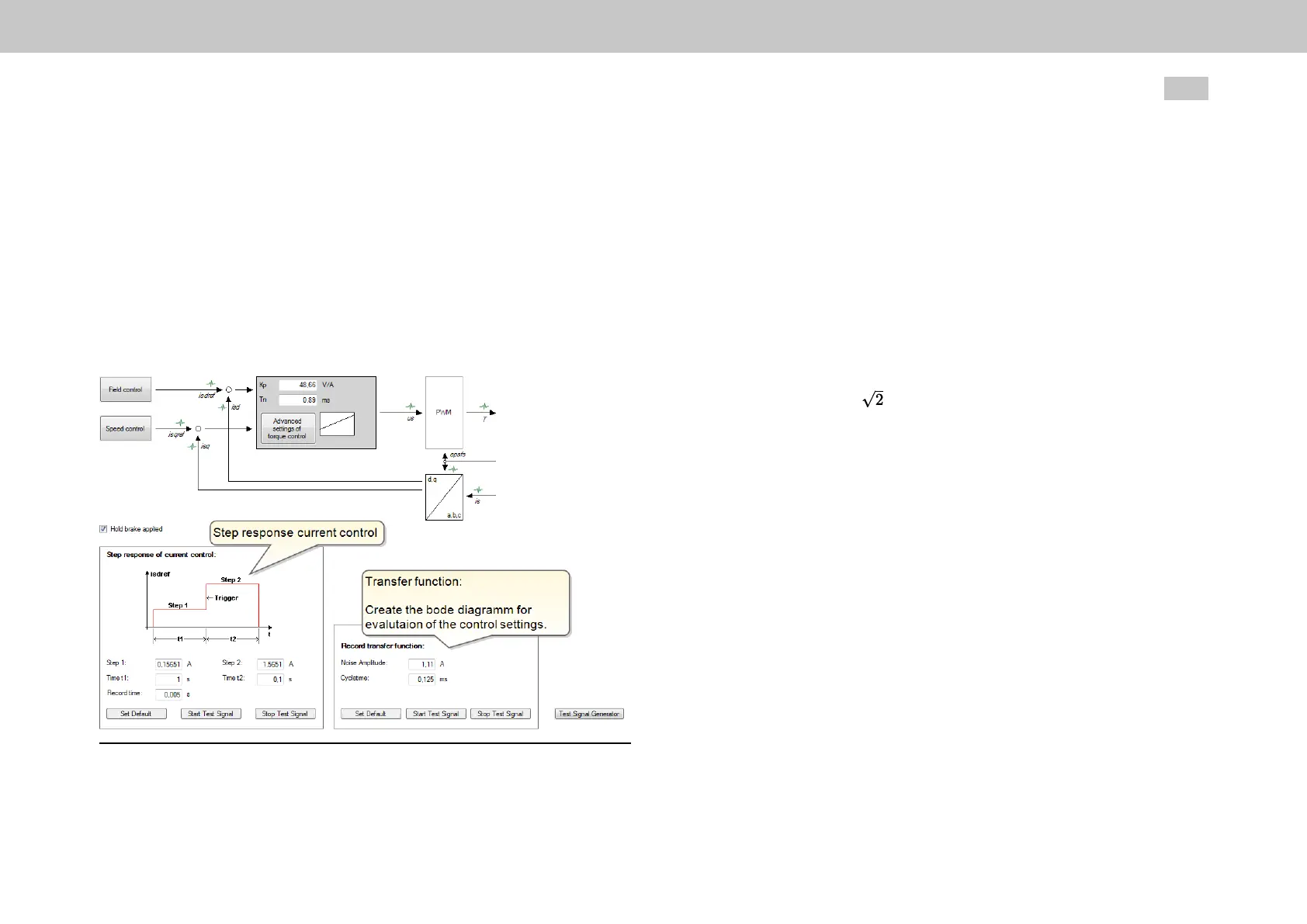
Fig. 7.5: “Current/torque controller settings” dialog box
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
110
7 Control
7.3.1Currentcontrolleroptimization
The faster the actual value approaches the setpoint, the more dynamically the
controller is set. The overshoot of the actual value should not be more than
5-10 % of the setpoint (general figure) during the settling process.
Thefirststep(stage1,time1)movestherotortoadefinedposition.
Thesecondstep(stage2,time2)isusedtooptimizethetorquecontrol(step
response).Themagnitudeofthe2ndstepshouldnotbetoolarge,soasto
ensurethatthevoltagesetpointwillnotgoallthewaytothelimit(low-level
signalresponserequired).
Thecurrentandtimesettingsautomaticallyadjusttothemotordata.The
currentisequaltoI
n
• .
ISDSHandENPO(hardwareenable)mustbesetto"High".
Click"Starttestsignal"button
Observethesafetynotice:Whenyouconfirmthesafetynoticeastep
responseisexecuted.
Theoscilloscopewillbeconfiguredautomatically.

 Loading...
Loading...