ID Index Name Unit Description
253 0 MPRO_ECAM_Egear_
GearInMode
EGEAR:GearIn-Modetogearin
255 0 MPRO_ECAM_Egear_
GearInAcc
rev/min/s EGEAR:GearIn-Accelerationofgearmode
ramp
257 0 MPRO_ECAM_Egear_
GearInDist
incr EGEAR:GearIn-Distancetogearin
263 0 MPRO_ECAM_Egear_
GearInJerk
rpm/s^2 EGEAR:GearIn-Jerkofgearmoderamp
Table 8.39: “Synchronized motion - Electronic gearing - Engagement” parameters
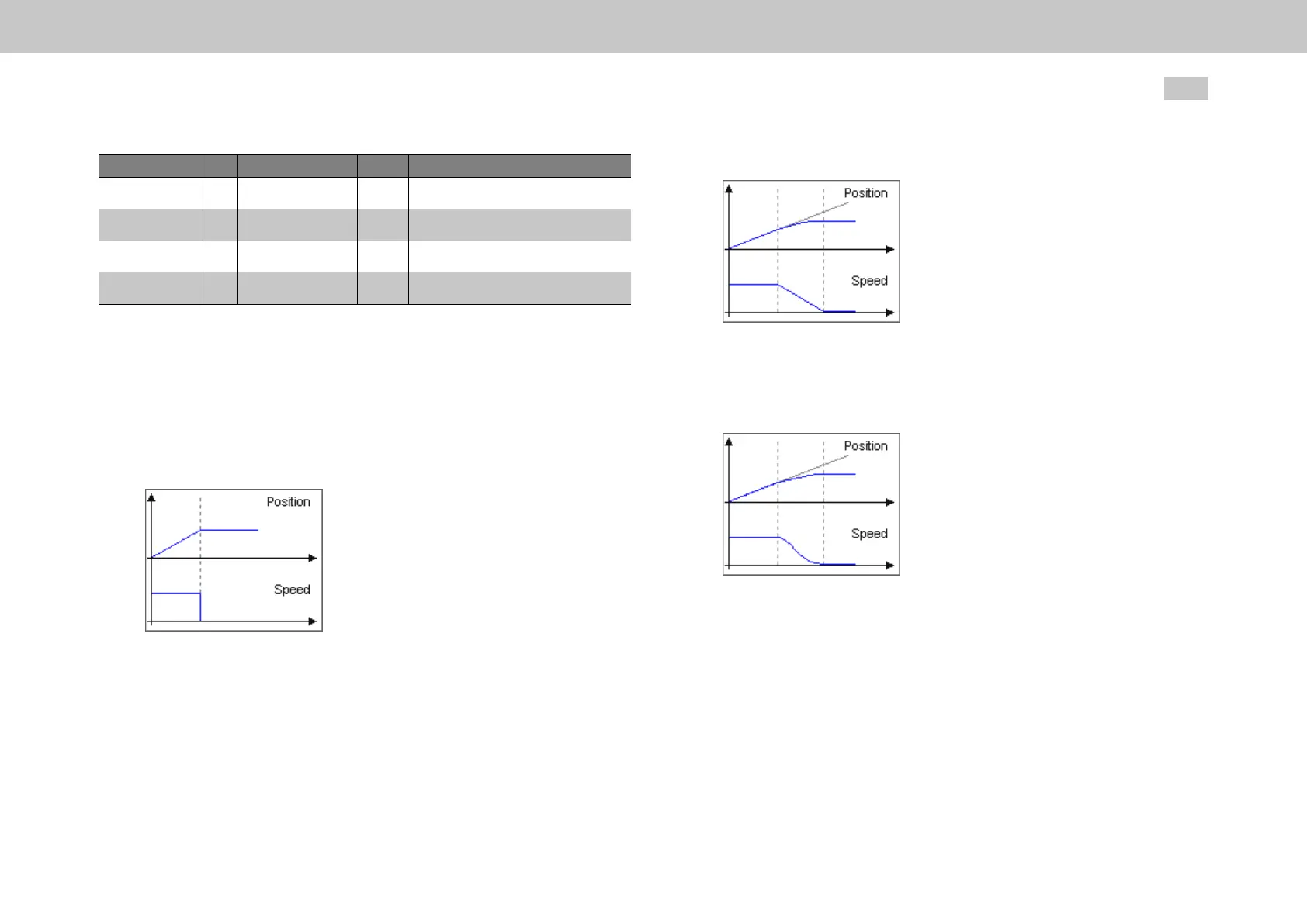
8.11.7Disengagement
P254[0] - MPRO_ECAM_Egear_GearOutMode is used to define the mode for
disengagement.
DIRECT (0) = Direct
Directdisengagement:Withjerking(noramps).
RAMP (1) = Linear speed ramp
Disengagementwithlineardeceleration:Withjerking.P 256[0](seebelow)
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
227
8 Motion profile
canbeusedtodefinethedeceleration.
FADE (2) = Engagement fade-out
Disengagementwithfade-outfunction(5thdegreepolynomial):Jerk-limited.
Thepositionisignored.Therealwaysremainsavariationbetweenreference
andactualposition.P 258[0](seebelow)isusedtodefinethe
disengagementdistance(betweenthedashedlines).
P256[0] - MPRO_ECAM_Egear_GearOutAcc is used to define the deceleration for
the "RAMP (1)” mode.
P258[0] - MPRO_ECAM_Egear_GearOutDist is used to define the disengagement
distance. The actual disengagement occurs within this range (between the dashed
lines).

 Loading...
Loading...