6.8.1Sensorlesscontrolsynchronousmotor
NOTE
SensorlesscontrolwithanexpandedKalmanfilterrequiresthe
followingfirmwareversions:
o
MSDServoDrive:V3.25-95orhigher
o
MSDSingle-AxisServoDriveCompact:V1.30-98
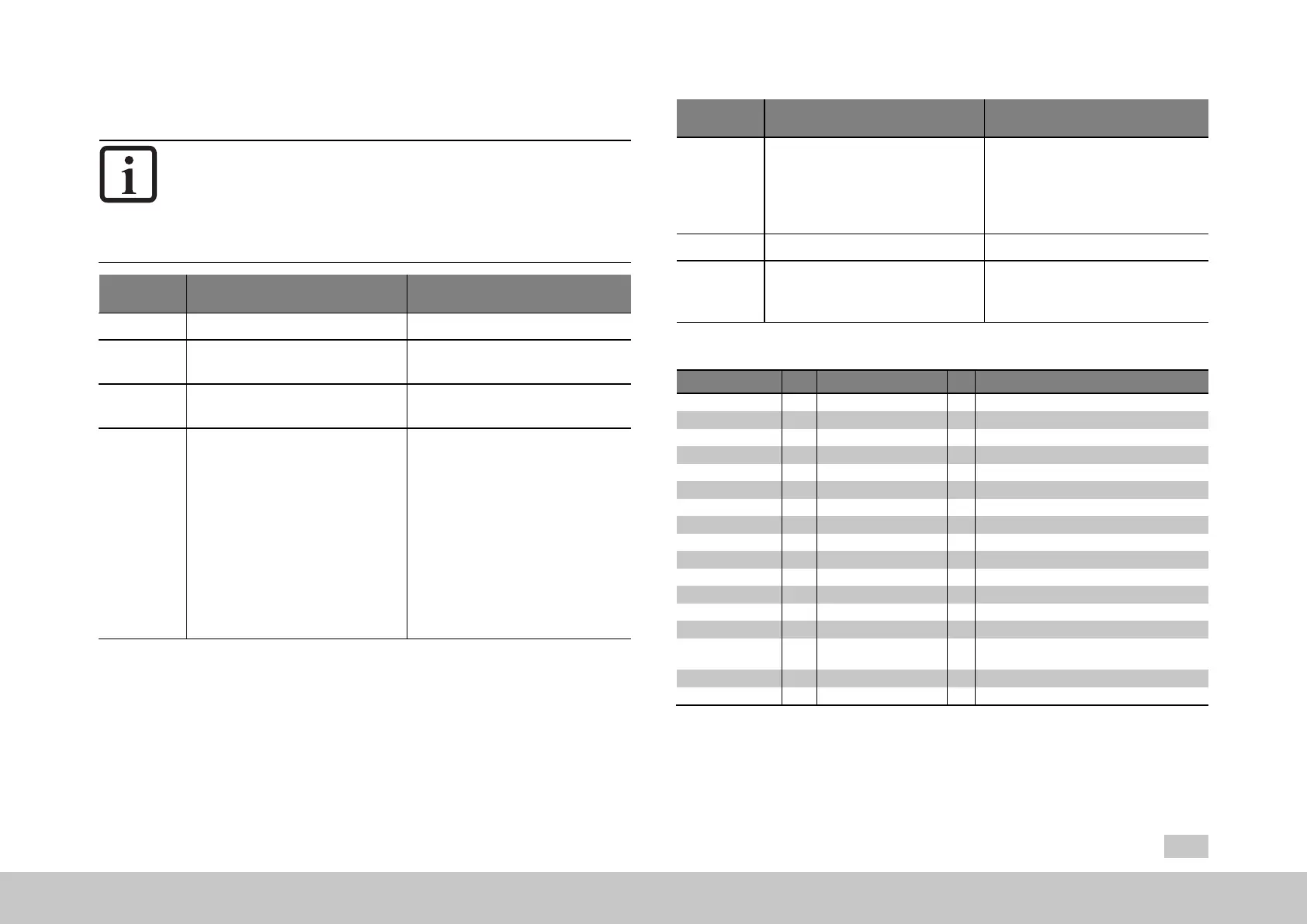
Value Value replacement text Description
0 READY Waitsforinput
1 TAKEOVER_ENCCH1
Switchestoencoderchannel1in
real-time
2 TAKEOVER_ENCCH4
Switchestoencoderchannel4in
real-time
3 PRESET
Generalinitializationforencoder
channel4withsensorlesscontrol;
thefollowingarecarriedout
duringthisinitializationroutine:
Thetestsignalgenerator
isconfigured
TheQmatrix,Rmatrixare
calculated
InitializingtheKalman
filter
Table 6.28: ENC_CH4_Ctrl (P783) control word
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
89
6 Encoder
Value Value replacement text Description
4 START_KAL
StartsandinitializestheKalman
filterwithoutdeterminingthe
noisecovariancematricesand
withoutconfiguringthetestsignal
generator
5 STOP_KAL StopencodermoduleCH4
6 CALC_RQ
Calculatesnoisecovariance
matricesRandQbasedonthe
configuredmotorparameters
Table 6.28: ENC_CH4_Ctrl (P783) control word (continue)
P No. Index Name Unit Description
339 CON_SCON_Kalman Kalman:Setting
0 Tf_Kalman ms Kalman:Integraltime
1 KpScale_Kalman % Kalman:Gain
350 CON_SCALC_SEL Usedtoselectthespeedcalculationmethod
0 SEL_ObserverMethod Selectionofspeedcalculationmethod
508 0 ENC_CH4_Sel Selectionofencodertype
783 0 ENC_CH4_Ctrl Control
790 0 ENC_CH4_Kalman_R Sensorlesscontrol:Rmatrix
791 ENC_CH4_Kalman_Q Sensorlesscontrol:Qmatrix
791 0 Q[0,0] Sensorlesscontrol:Qmatrix(id)
791 1 Q[1,1] Sensorlesscontrol:Qmatrix(iq)
791 2 Q[2,2] Sensorlesscontrol:Qmatrix(omega)
791 3 Q[3,3] Sensorlesscontrol:Qmatrix(epsilon)
791 4 Q[4,4] Sensorlesscontrol:Qmatrix(Tload)
792 ENC_CH4_Kalman_
SigInj
Sensorlesscontrol:Testsignalgenerator
792 0 Signal SCtestsignal:Signalcalculationselection
792 1 Frequency Hz SCtestsignal:Sinusoidalsignalfrequency
Table 6.29: “Sensorless synchronous motor control” parameters

 Loading...
Loading...