8.5.4Method(-10)andmethod(-11):Movingtoblock
withzeropulse
Tracking error monitoring is switched off during the homing procedure.
The maximum permissible torque can be reduced specifically during during the
homing. To do so, parameter P 0225 MPRO_REF_HOMING_ TMaxScale is set in
the range 0-100 %. Note that this parameter replaces parameter P 0332
CON_SCON_TMaxScale during the homing run.
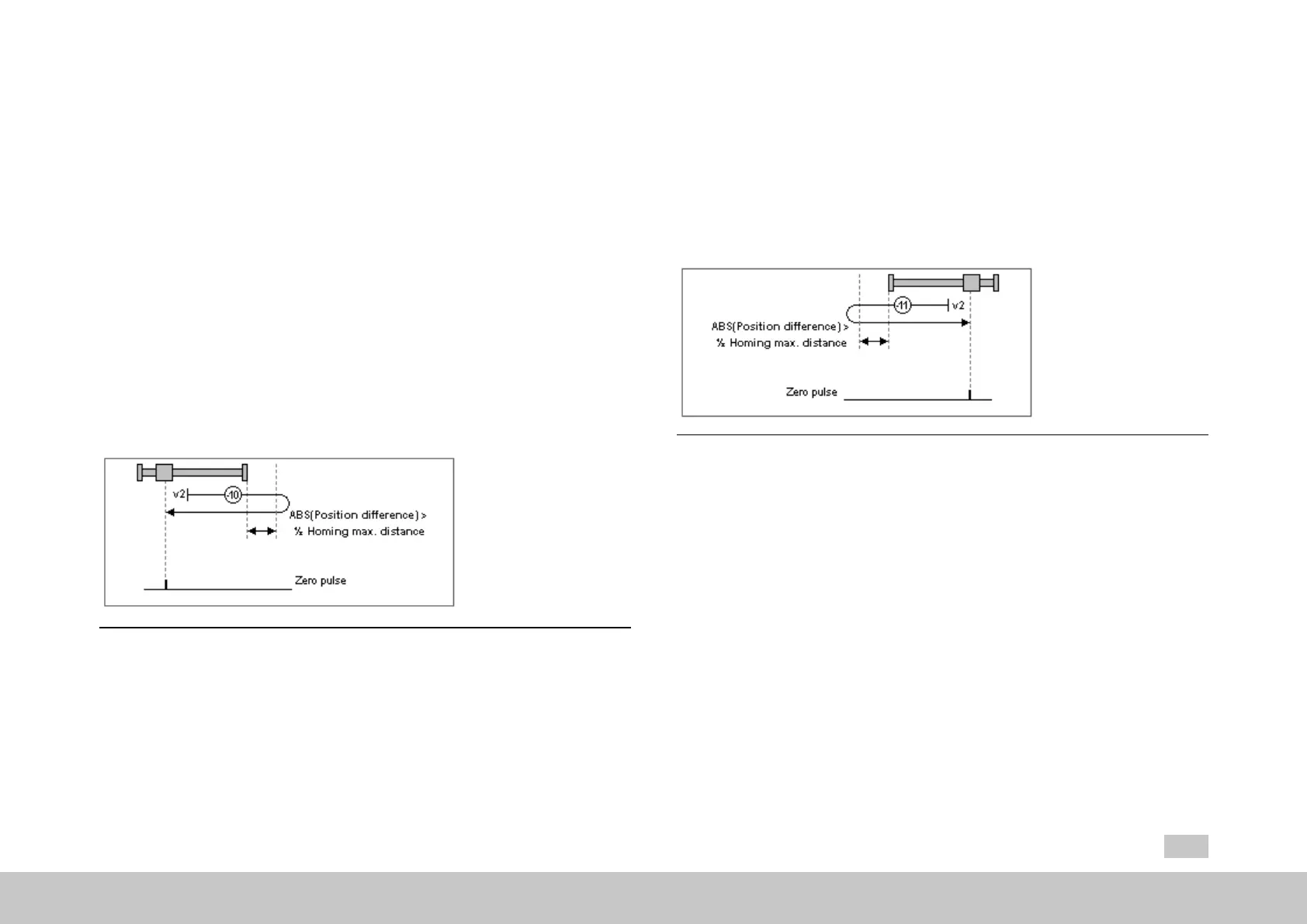
8.5.4.1Method(-10):Rightwarddirectionoftravel
With P 0169 MPRO_REF_HOMING_MaxDistance the positioning range in which to
search for the block is specified. After approaching the block, the drive reverses the
direction of rotation until a zero pulse is detected. The first zero pulse after reversing
direction corresponds to the zero point. An offset can be programmed in the dialog
box.
Fig. 8.41: Moving to block, rightward direction of travel with zero pulse
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
192
8 Motion profile
8.5.4.2Method(-11):Leftwarddirectionoftravel
With P 0169 P 0169 MPRO_REF_HOMING_MaxDistance the positioning range in
which to search for the block is specified. After approaching the block, the drive
reverses the direction of rotation until a zero pulse is detected. The first zero pulse
after reversing direction corresponds to the zero point. An offset can be programmed
in the dialog box.
Fig. 8.42: Approach block, direction of travel left, with zero pulse

 Loading...
Loading...