Loading a motor data set
Motordataandcontrolsettingsdialogbox
Selectdataset
Enterencodersettings
Savedata
Commissioning a third-party motor
In the case of third-party motors, basic suitability for operation with servo drives from
Moog must first be verified on the basis of the motor data and the data of any
installed encoder. The values of the parameters for adaptation of the servo drive
must be determined specifically for each motor by calculation or identification. The
two methods differ in that when the motor data set is calculated, the impedances
must be taken from the data sheet. In identification the impedances are measured
automatically. Each motor can only be operated if its field model and the control
parameters are correctly set.
You can obtain the data sets for all standard synchronous motors. On transfer of a
standard motor data set the motor name, electrical data and motion mode are
loaded. Preset parameters are overwritten. The motor data must then be saved in
the device. The motor parameters specified by the manufacturer ensure that a motor
can be subjected to load according to its operational characteristic, provided the
corresponding power is supplied by the drive.
NOTE
Eachmotorcanonlybeoperatedifitsfieldmodelandthecontrol
parametersarecorrectlyset.
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
32
5 Motor
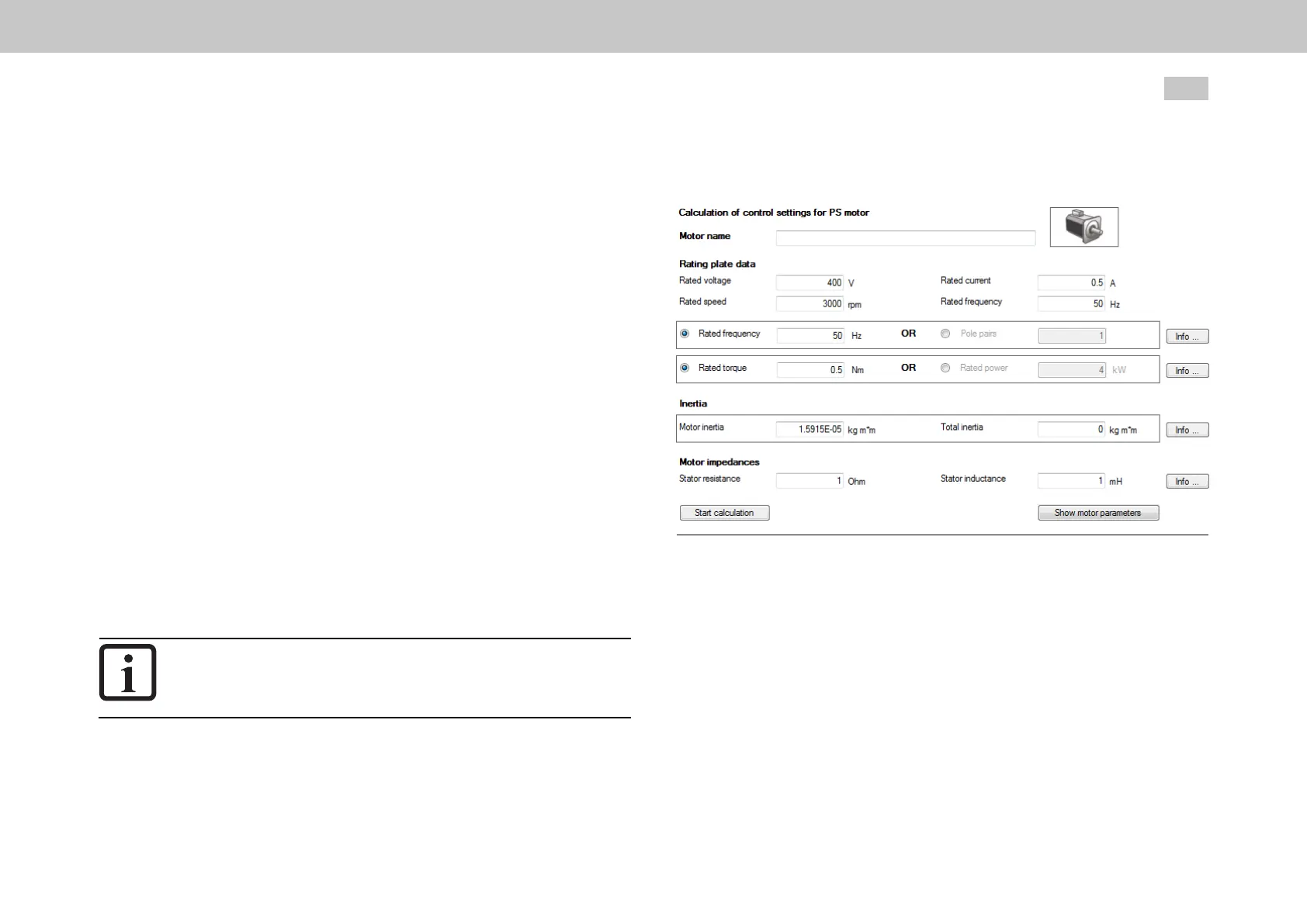
5.2Synchronousmotor
Fig. 5.2: “Synchronous motor configuration” screen
There are two methods of creating a motor data set for the rotary synchronous motor.
Variant1:Motorcalculation
Variant2:Motoridentification(see Section"Motoridentification"onpage
43)

 Loading...
Loading...