Rotary weighting
Unit Weighting factor
Factory setting (LSB)
rad/s
2
3.600.000 E
-3
Table 8.13: Weighting for rotary motion (default setting)
8.2.2.5Moduloweighting
If you will be selecting modulo (indexing table application) (see Section "“As
linear” process option" on page 166), the number range for the position data
(modulo value) must be entered. When the modulo value is exceeded the actual
position is reset to 0.
8.2.3User defined
No wizard is available for user-defined scaling. The following “Custom scaling
diagram” is intended to help with configuring it. Calculation of the factors for position,
speed and acceleration is dependent on the selected user unit and the feed
constant or gear ratio.
MOOG
ID
No.: CB40859-001 Date: 02/2018
MSD Servo Drive- Device Help
177
8 Motion profile
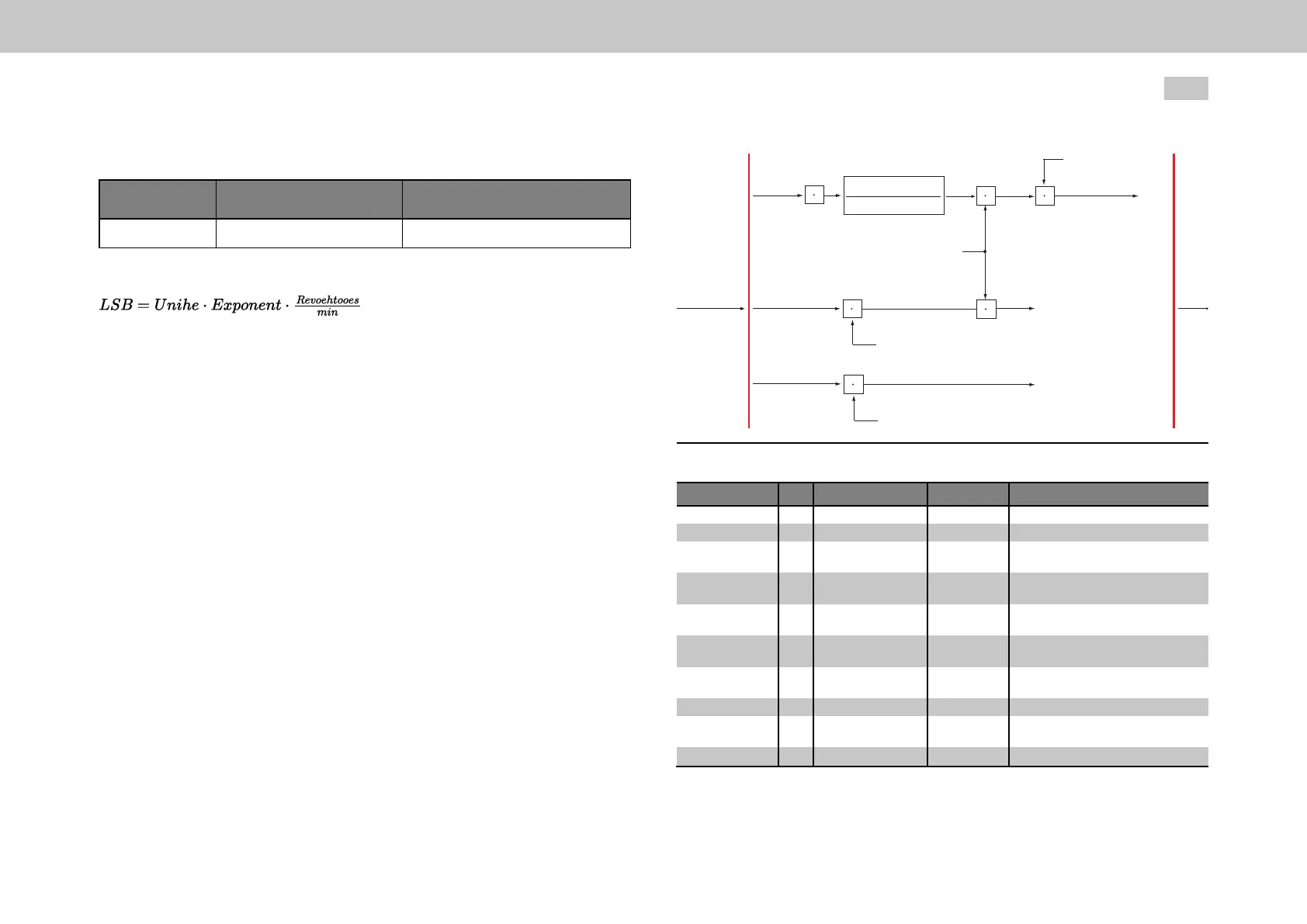
Position
[Pos Unit]
P 0270 MPRO_FG_PosNorm
Pos [incr]
P 0271 MPRO_FG_Num
P 0272 MPRO_FG_Den
P 0273 MPRO_FG_Reverse
Speed [rev/min]
P 0274 MPRO_FG_SpeedFac
Speed [Speed Unit]Control command Control
Acc [rev/s²]
P 0275 MPRO_FG_AccFac
Acceleration [Acc Unit]
x
y
x
y
x
y
x
y
x
y
x
y
Fig. 8.23: Schematic of user-defined scaling
ID Index Name Unit Description
163 0 MPRO_FG_Config Factorgroupconfiguration
270 0 MPRO_FG_PosNorm incr/rev Internalpositionresolution
271 0 MPRO_FG_Num rev Factorgroup:Numerator(profile-
independent)
272 0 MPRO_FG_Den mDegree Factorgroup:denominator(profile
independent)
273 0 MPRO_FG_Reverse Factorgroup:Positionandspeedreverse
(profile-independent)
274 0 MPRO_FG_SpeedFac rev/min/SPEED Factorgroup:speedfactor(profile
independent)
275 0 MPRO_FG_AccFac rev/s^2/ACC Factorgroup:accelerationfactor(profile
independent)
284 0 MPRO_FG_PosUnit Unitforpositionvalues
285 0 MPRO_FG_PosExp Factorgroup:Positionunitexponent
(profile-independent)
286 0 MPRO_FG_ Factorgroup:Positionunitscalingfactor
Table 8.14: “Standardization / units - Custom” parameters

 Loading...
Loading...